 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary
Oct 02, 2019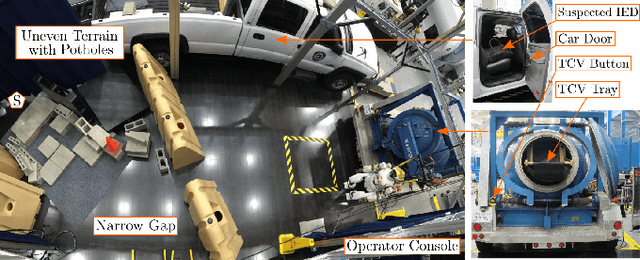
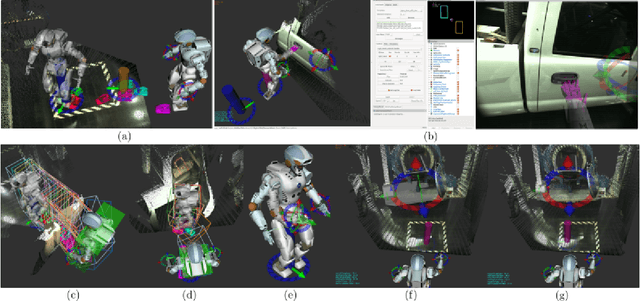
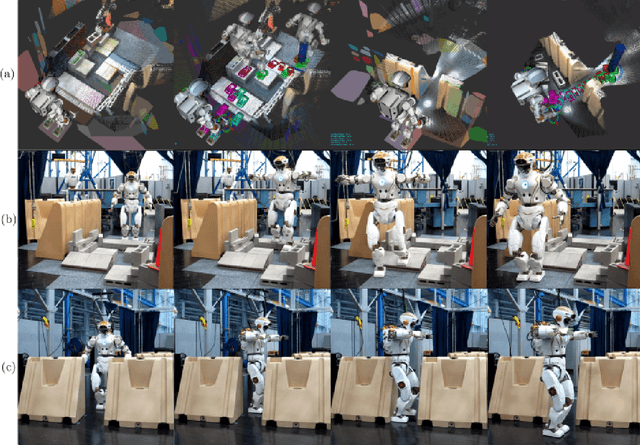
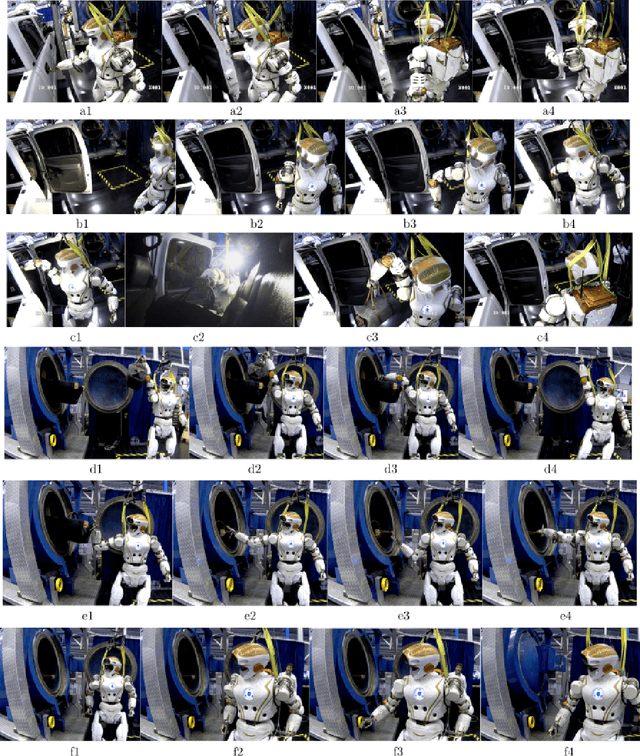
As part of a feasibility study, this paper shows the NASA Valkyrie humanoid robot performing an end-to-end improvised explosive device (IED) response task. To demonstrate and evaluate robot capabilities, sub-tasks highlight different locomotion, manipulation, and perception requirements: traversing uneven terrain, passing through a narrow passageway, opening a car door, retrieving a suspected IED, and securing the IED in a total containment vessel (TCV). For each sub-task, a description of the technical approach and the hidden challenges that were overcome during development are presented. The discussion of results, which explicitly includes existing limitations, is aimed at motivating continued research and development to enable practical deployment of humanoid robots for IED response. For instance, the data shows that operator pauses contribute to 50\% of the total completion time, which implies that further work is needed on user interfaces for increasing task completion efficiency.
Grasping for a Purpose: Using Task Goals for Efficient Manipulation Planning
Mar 14, 2016
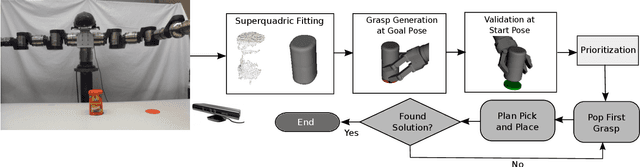
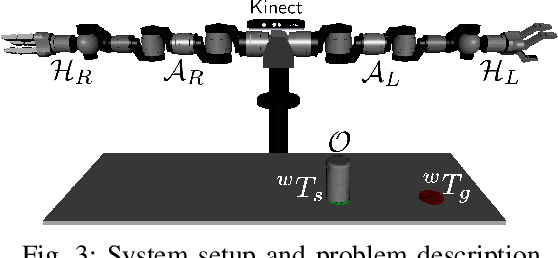
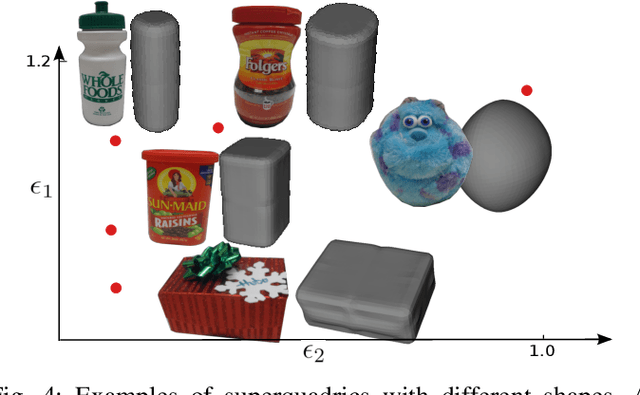
In this paper we propose an approach for efficient grasp selection for manipulation tasks of unknown objects. Even for simple tasks such as pick-and-place, a unique solution is rare to occur. Rather, multiple candidate grasps must be considered and (potentially) tested till a successful, kinematically feasible path is found. To make this process efficient, the grasps should be ordered such that those more likely to succeed are tested first. We propose to use grasp manipulability as a metric to prioritize grasps. We present results of simulation experiments which demonstrate the usefulness of our metric. Additionally, we present experiments with our physical robot performing simple manipulation tasks with a small set of different household objects.