 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Find Common Objects Across Image Collections
Apr 29, 2019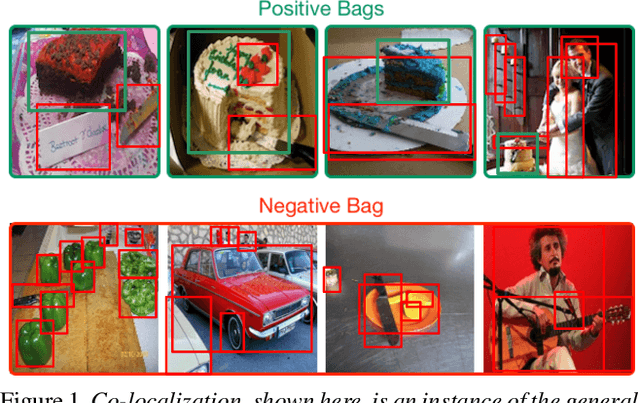
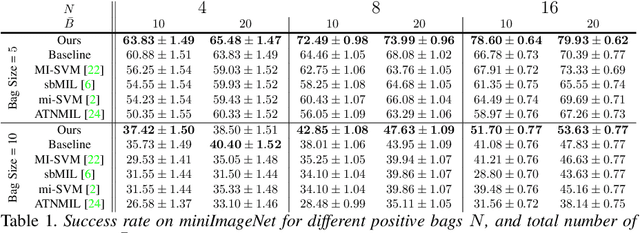
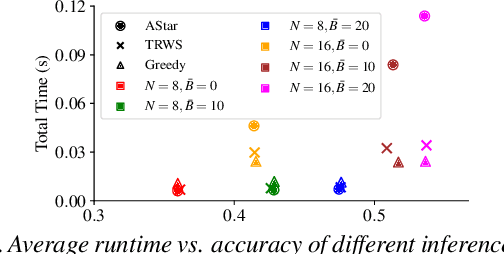
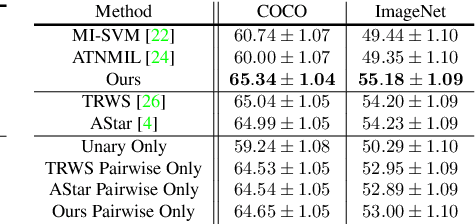
We address the problem of finding a set of images containing a common, but unknown, object category from a collection of image proposals. Our formulation assumes that we are given a collection of bags where each bag is a set of image proposals. Our goal is to select one image from each bag such that the selected images are of the same object category. We model the selection as an energy minimization problem with unary and pairwise potential functions. Inspired by recent few-shot learning algorithms, we propose an approach to learn the potential functions directly from the data. Furthermore, we propose a fast and simple greedy inference algorithm for energy minimization. We evaluate our approach on few-shot common object recognition and object co-localization tasks. Our experiments show that learning the pairwise and unary terms greatly improves the performance of the model over several well-known methods for these tasks. The proposed greedy optimization algorithm achieves performance comparable to state-of-the-art structured inference algorithms while being ~10 times faster. The code is publicly available on https://github.com/haamoon/finding_common_object.
Truncated Back-propagation for Bilevel Optimization
Oct 25, 2018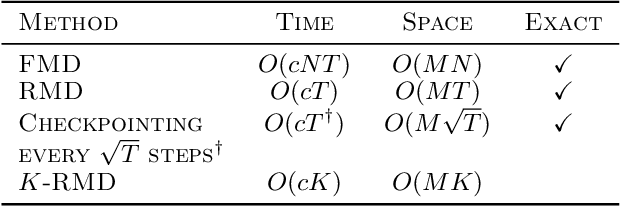
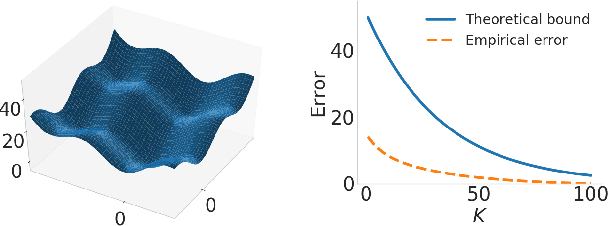
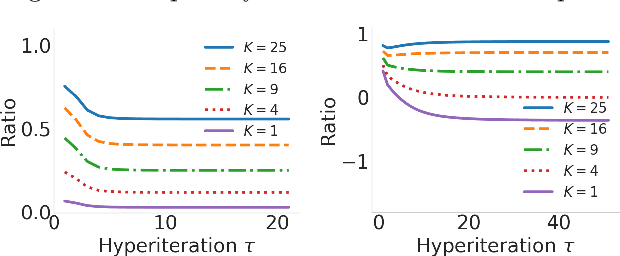
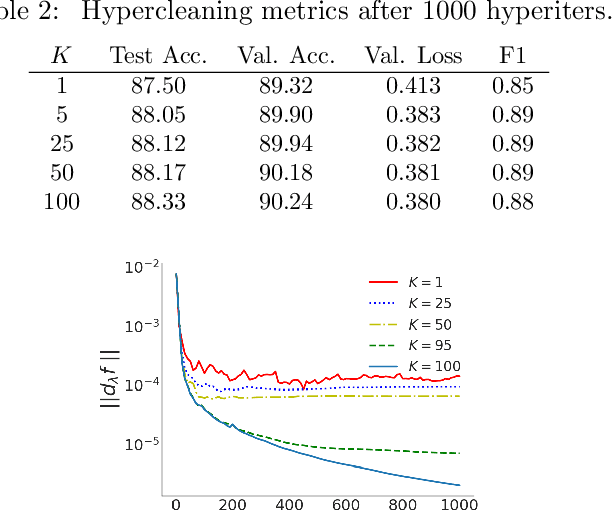
Bilevel optimization has been recently revisited for designing and analyzing algorithms in hyperparameter tuning and meta learning tasks. However, due to its nested structure, evaluating exact gradients for high-dimensional problems is computationally challenging. One heuristic to circumvent this difficulty is to use the approximate gradient given by performing truncated back-propagation through the iterative optimization procedure that solves the lower-level problem. Although promising empirical performance has been reported, its theoretical properties are still unclear. In this paper, we analyze the properties of this family of approximate gradients and establish sufficient conditions for convergence. We validate this on several hyperparameter tuning and meta learning tasks. We find that optimization with the approximate gradient computed using few-step back-propagation often performs comparably to optimization with the exact gradient, while requiring far less memory and half the computation time.
Deep Forward and Inverse Perceptual Models for Tracking and Prediction
May 20, 2018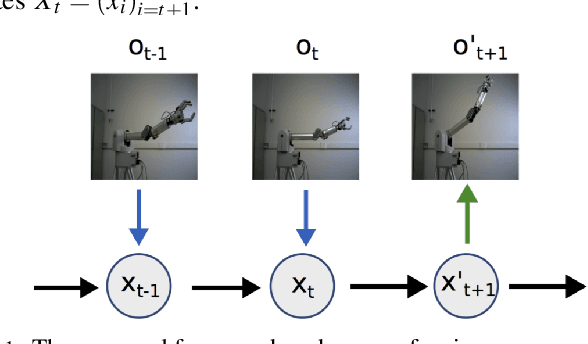
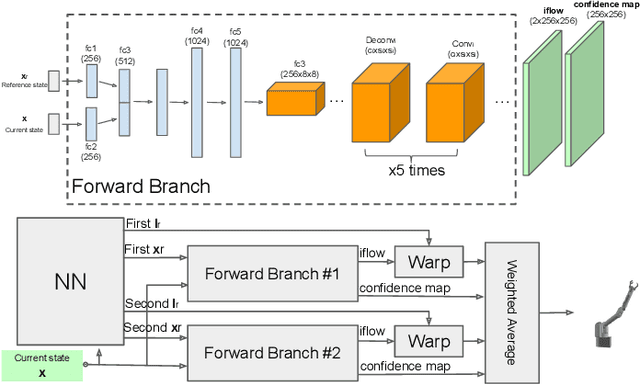
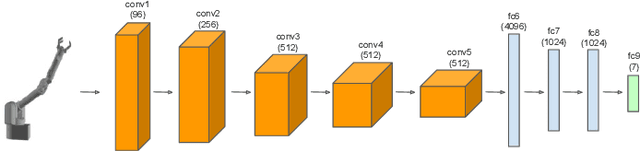
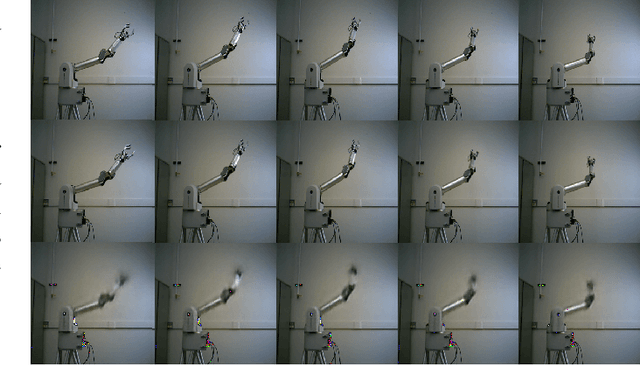
We consider the problems of learning forward models that map state to high-dimensional images and inverse models that map high-dimensional images to state in robotics. Specifically, we present a perceptual model for generating video frames from state with deep networks, and provide a framework for its use in tracking and prediction tasks. We show that our proposed model greatly outperforms standard deconvolutional methods and GANs for image generation, producing clear, photo-realistic images. We also develop a convolutional neural network model for state estimation and compare the result to an Extended Kalman Filter to estimate robot trajectories. We validate all models on a real robotic system.
One-Shot Learning for Semantic Segmentation
Sep 11, 2017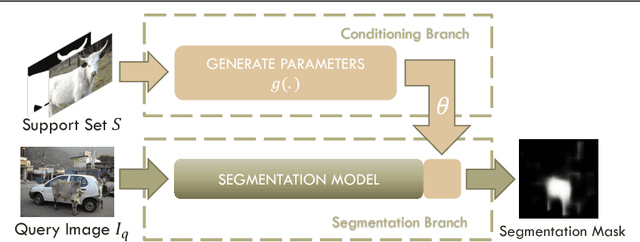
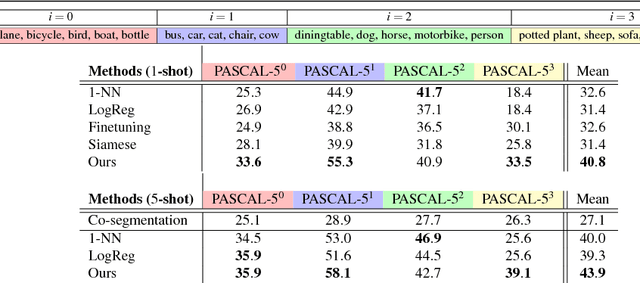
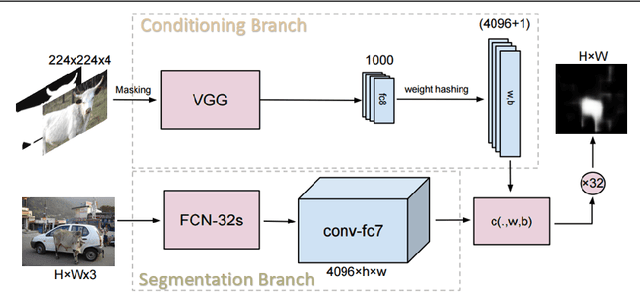
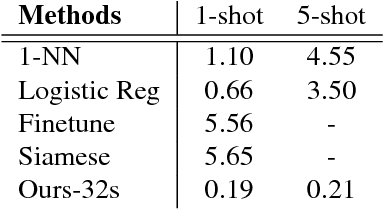
Low-shot learning methods for image classification support learning from sparse data. We extend these techniques to support dense semantic image segmentation. Specifically, we train a network that, given a small set of annotated images, produces parameters for a Fully Convolutional Network (FCN). We use this FCN to perform dense pixel-level prediction on a test image for the new semantic class. Our architecture shows a 25% relative meanIoU improvement compared to the best baseline methods for one-shot segmentation on unseen classes in the PASCAL VOC 2012 dataset and is at least 3 times faster.
Cascading Randomized Weighted Majority: A New Online Ensemble Learning Algorithm
Feb 02, 2015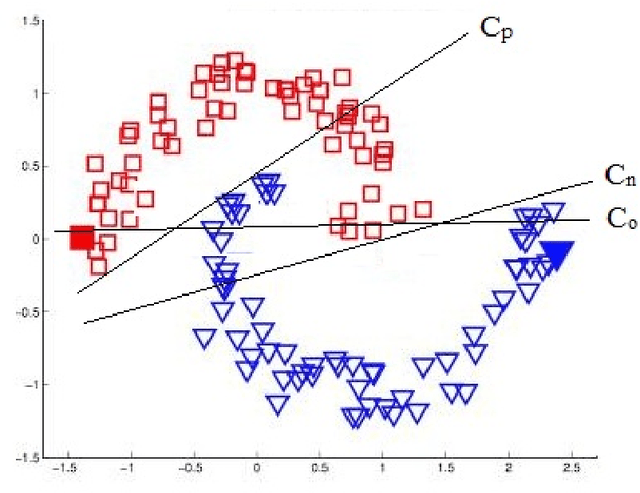
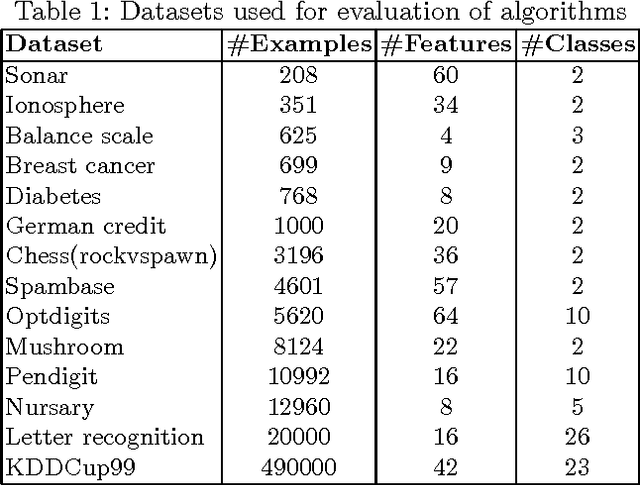
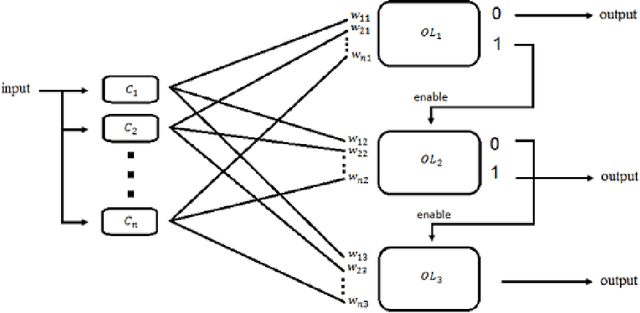
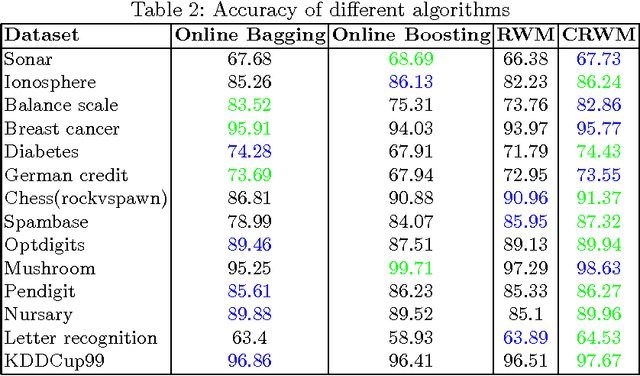
With the increasing volume of data in the world, the best approach for learning from this data is to exploit an online learning algorithm. Online ensemble methods are online algorithms which take advantage of an ensemble of classifiers to predict labels of data. Prediction with expert advice is a well-studied problem in the online ensemble learning literature. The Weighted Majority algorithm and the randomized weighted majority (RWM) are the most well-known solutions to this problem, aiming to converge to the best expert. Since among some expert, the best one does not necessarily have the minimum error in all regions of data space, defining specific regions and converging to the best expert in each of these regions will lead to a better result. In this paper, we aim to resolve this defect of RWM algorithms by proposing a novel online ensemble algorithm to the problem of prediction with expert advice. We propose a cascading version of RWM to achieve not only better experimental results but also a better error bound for sufficiently large datasets.
Local Similarities, Global Coding: An Algorithm for Feature Coding and its Applications
Mar 05, 2014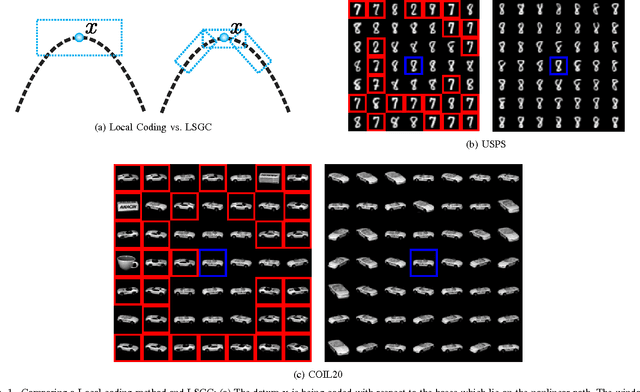
Data coding as a building block of several image processing algorithms has been received great attention recently. Indeed, the importance of the locality assumption in coding approaches is studied in numerous works and several methods are proposed based on this concept. We probe this assumption and claim that taking the similarity between a data point and a more global set of anchor points does not necessarily weaken the coding method as long as the underlying structure of the anchor points are taken into account. Based on this fact, we propose to capture this underlying structure by assuming a random walker over the anchor points. We show that our method is a fast approximate learning algorithm based on the diffusion map kernel. The experiments on various datasets show that making different state-of-the-art coding algorithms aware of this structure boosts them in different learning tasks.