 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEP-NMPC: Safety Enhanced Passivity-Based Nonlinear Model Predictive Control for a UAV Slung Payload System
Mar 09, 2026Model Predictive Control (MPC) is widely adopted for agile multirotor vehicles, yet achieving both stability and obstacle-free flight is particularly challenging when a payload is suspended beneath the airframe. This paper introduces a Safety Enhanced Passivity-Based Nonlinear MPC (SEP-NMPC) that provides formal guarantees of stability and safety for a quadrotor transporting a slung payload through cluttered environments. Stability is enforced by embedding a strict passivity inequality, which is derived from a shaped energy storage function with adaptive damping, directly into the NMPC. This formulation dissipates excess energy and ensures asymptotic convergence despite payload swings. Safety is guaranteed through high-order control barrier functions (HOCBFs) that render user-defined clearance sets forward-invariant, obliging both the quadrotor and the swinging payload to maintain separation while interacting with static and dynamic obstacles. The optimization remains quadratic-program compatible and is solved online at each sampling time without gain scheduling or heuristic switching. Extensive simulations and real-world experiments confirm stable payload transport, collision-free trajectories, and real-time feasibility across all tested scenarios. The SEP-NMPC framework therefore unifies passivity-based closed-loop stability with HOCBF-based safety guarantees for UAV slung-payload transportation.
L-PR: Exploiting LiDAR Fiducial Marker for Unordered Low Overlap Multiview Point Cloud Registration
Jun 05, 2024



Point cloud registration is a prerequisite for many applications in computer vision and robotics. Most existing methods focus on pairwise registration of two point clouds with high overlap. Although there have been some methods for low overlap cases, they struggle in degraded scenarios. This paper introduces a novel framework named L-PR, designed to register unordered low overlap multiview point clouds leveraging LiDAR fiducial markers. We refer to them as LiDAR fiducial markers, but they are the same as the popular AprilTag and ArUco markers, thin sheets of paper that do not affect the 3D geometry of the environment. We first propose an improved adaptive threshold marker detection method to provide robust detection results when the viewpoints among point clouds change dramatically. Then, we formulate the unordered multiview point cloud registration problem as a maximum a-posteriori (MAP) problem and develop a framework consisting of two levels of graphs to address it. The first-level graph, constructed as a weighted graph, is designed to efficiently and optimally infer initial values of scan poses from the unordered set. The second-level graph is constructed as a factor graph. By globally optimizing the variables on the graph, including scan poses, marker poses, and marker corner positions, we tackle the MAP problem. We conduct qualitative and quantitative experiments to demonstrate that the proposed method exhibits superiority over competitors in four aspects: registration accuracy, instance reconstruction quality, localization accuracy, and robustness to the degraded scene. To benefit the community, we open-source our method and dataset at https://github.com/yorklyb/LiDAR-SFM.
Ghost-DeblurGAN and Its Application to Fiducial Marker System
Sep 12, 2021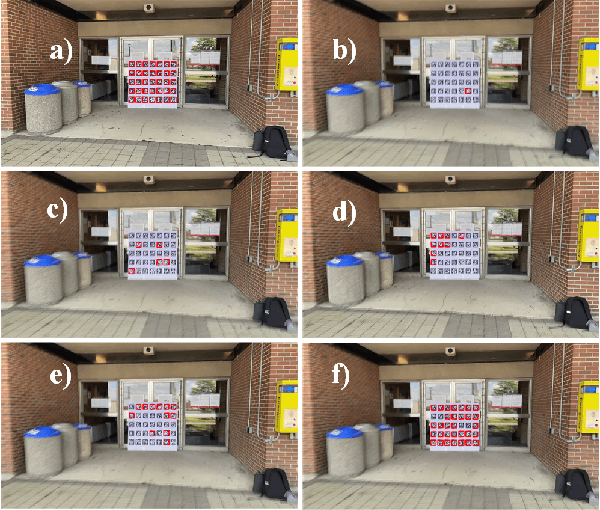
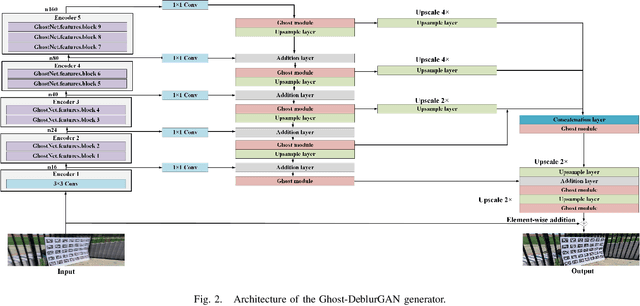
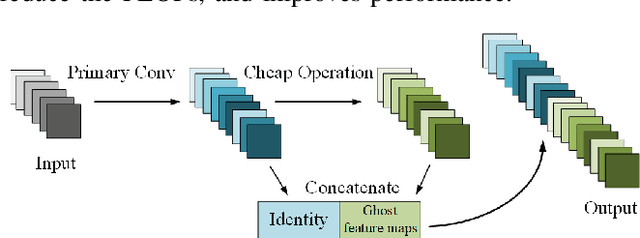
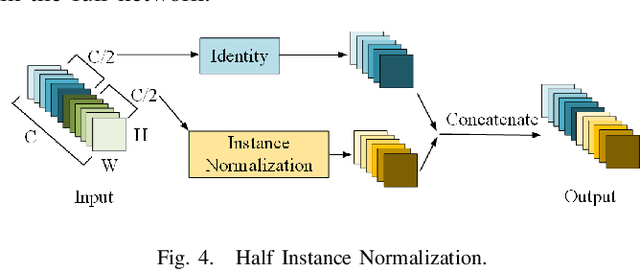
Motion blur can impede marker detection and marker-based pose estimation, which is common in real-world robotic applications involving fiducial markers. To solve this problem, we propose a novel lightweight generative adversarial network (GAN), Ghost-DeblurGAN, for real-time motion deblurring. Furthermore, a new large-scale dataset, YorkTag, provides pairs of sharp/blurred images containing fiducial markers and is proposed to train and qualitatively and quantitatively evaluate our model. Experimental results demonstrate that when applied along with fudicual marker systems to motion-blurred images, Ghost-DeblurGAN improves the marker detection significantly and mitigates the rotational ambiguity problem in marker-based pose estimation.