 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Learning for Rapid Adaptation in Reference Tracking of Uncertain Nonlinear Systems
May 21, 2026In this paper, we address the problem of reference tracking for uncertain nonlinear systems. Since collecting data from the target system (i.e., the system of interest) is often challenging, our objective is to design optimal controllers using limited target system data. Meta-learning provides a promising paradigm by leveraging offline data from source systems (systems sharing structural similarities with the target system) to accelerate training and enhance control performance. Motivated by this idea, we propose a meta-learning-based control framework that tailors the implicit model-agnostic meta-learning (iMAML) algorithm to the control setting. The framework operates in two phases: an (offline) meta-training phase, where an aggregated representation is learned from source data to capture the shared system dynamics among similar systems, and an (online) meta-adaptation phase, where this representation is fine-tuned on the target system using only a few data samples and limited adaptation steps. We formulate this framework as a bi-level optimization problem and provide an efficient solution with reduced storage complexity and few approximations. The proposed framework is general, allowing various learning algorithms to be integrated. To demonstrate this flexibility, we propose two specific learning algorithms that can be incorporated into our framework based on a neural state-space model and a deep Q-network, respectively. The primary distinction between these approaches is whether explicit system identification is required. Numerical simulations and hardware experiments demonstrate that the proposed methods enhance control performance and consistently outperform baseline approaches.
Deep Reinforcement Learning for Flexible Job Shop Scheduling with Random Job Arrivals
May 21, 2026The Flexible Job Shop Scheduling Problem (FJSP) is the optimal allocation of a set of jobs to machines. Two primary challenges persist in FJSP: the unpredictable arrival of future jobs and the combinatorial complexity of the problem, rendering it intractable for conventional mixed-integer linear programming solvers. This paper proposes an event-based \gls{DRL} approach to solve FJSP with random job arrivals. Specifically, we employ the Proximal Policy Optimization algorithm and use lightweight Multi-Layer Perceptrons to train the \gls{DRL} agent for minimizing the total completion time of all jobs. We design the state representation to be directly accessible from the environment, and limit the learning agent to selecting from among a set of well-established dispatching rules. Simulations show that our \gls{DRL} approach outperforms any of the individual dispatching rules on datasets with varying heterogeneity and job arrival rates. We benchmark our \gls{DRL} against an arrival-triggered mixed-integer linear programming solution and show that our method achieves good performance especially when the datasets are heterogeneous.
Differentiable Material Point Method for the Control of Deformable Objects
Dec 15, 2025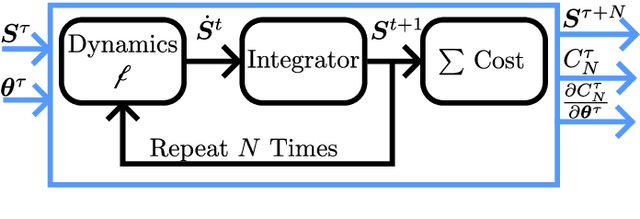
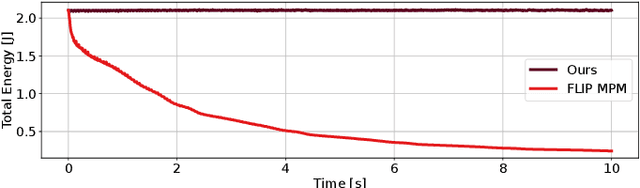
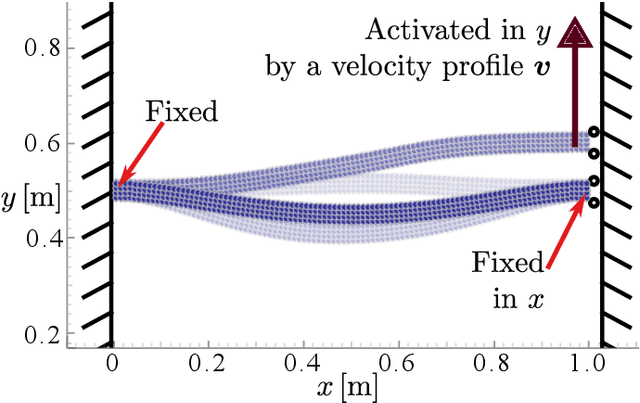
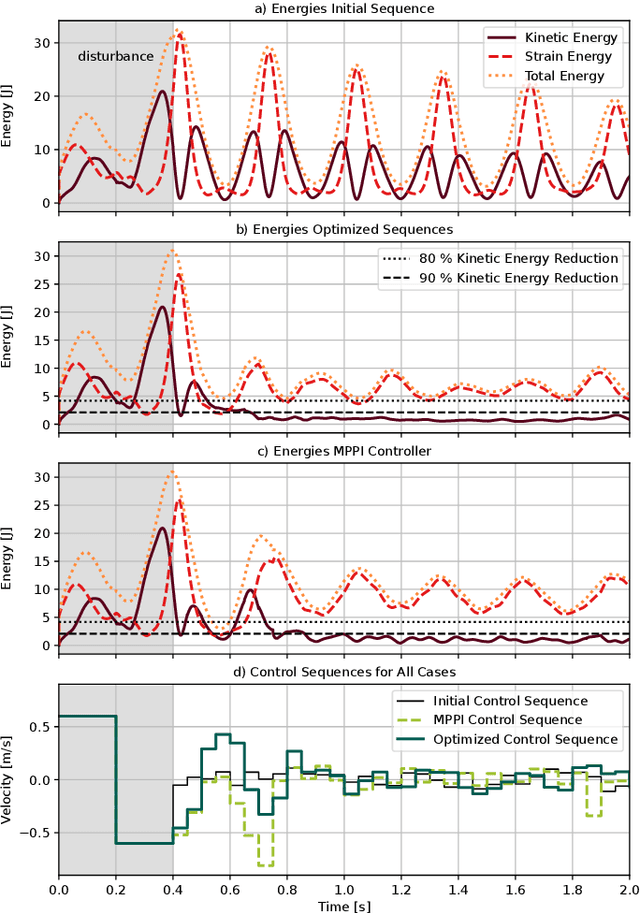
Controlling the deformation of flexible objects is challenging due to their non-linear dynamics and high-dimensional configuration space. This work presents a differentiable Material Point Method (MPM) simulator targeted at control applications. We exploit the differentiability of the simulator to optimize a control trajectory in an active damping problem for a hyperelastic rope. The simulator effectively minimizes the kinetic energy of the rope around 2$\times$ faster than a baseline MPPI method and to a 20% lower energy level, while using about 3% of the computation time.
Singularity-Avoidance Control of Robotic Systems with Model Mismatch and Actuator Constraints
Nov 12, 2024



Singularities, manifesting as special configuration states, deteriorate robot performance and may even lead to a loss of control over the system. This paper addresses the kinematic singularity concerns in robotic systems with model mismatch and actuator constraints through control barrier functions (CBFs). We propose a learning-based control strategy to prevent robots entering singularity regions. More precisely, we leverage Gaussian process (GP) regression to learn the unknown model mismatch, where the prediction error is restricted by a deterministic bound. Moreover, we offer the criteria for parameter selection to ensure the feasibility of CBFs subject to actuator constraints. The proposed approach is validated by high-fidelity simulations on a 2 degrees-of-freedom (DoFs) planar robot.
Iterative Learning Control with Mismatch Compensation for Residual Vibration Suppression in Delta Robots
Nov 12, 2024



Unwanted vibrations stemming from the energy-optimized design of Delta robots pose a challenge in their operation, especially with respect to precise reference tracking. To improve tracking accuracy, this paper proposes an adaptive mismatch-compensated iterative learning controller based on input shaping techniques. We establish a dynamic model considering the electromechanical rigid-flexible coupling of the Delta robot, which integrates the permanent magnet synchronous motor. Using this model, we design an optimization-based input shaper, considering the natural frequency of the robot, which varies with the configuration. We proposed an iterative learning controller for the delta robot to improve tracking accuracy. Our iterative learning controller incorporates model mismatch where the mismatch approximated by a fuzzy logic structure. The convergence property of the proposed controller is proved using a Barrier Composite Energy Function, providing a guarantee that the tracking errors along the iteration axis converge to zero. Moreover, adaptive parameter update laws are designed to ensure convergence. Finally, we perform a series of high-fidelity simulations of the Delta robot using Simscape to demonstrate the effectiveness of the proposed control strategy.
Safe Time-Varying Optimization based on Gaussian Processes with Spatio-Temporal Kernel
Sep 26, 2024Ensuring safety is a key aspect in sequential decision making problems, such as robotics or process control. The complexity of the underlying systems often makes finding the optimal decision challenging, especially when the safety-critical system is time-varying. Overcoming the problem of optimizing an unknown time-varying reward subject to unknown time-varying safety constraints, we propose TVSafeOpt, a new algorithm built on Bayesian optimization with a spatio-temporal kernel. The algorithm is capable of safely tracking a time-varying safe region without the need for explicit change detection. Optimality guarantees are also provided for the algorithm when the optimization problem becomes stationary. We show that TVSafeOpt compares favorably against SafeOpt on synthetic data, both regarding safety and optimality. Evaluation on a realistic case study with gas compressors confirms that TVSafeOpt ensures safety when solving time-varying optimization problems with unknown reward and safety functions.
Adaptive Bayesian Optimization for High-Precision Motion Systems
Apr 22, 2024Controller tuning and parameter optimization are crucial in system design to improve closed-loop system performance. Bayesian optimization has been established as an efficient model-free controller tuning and adaptation method. However, Bayesian optimization methods are computationally expensive and therefore difficult to use in real-time critical scenarios. In this work, we propose a real-time purely data-driven, model-free approach for adaptive control, by online tuning low-level controller parameters. We base our algorithm on GoOSE, an algorithm for safe and sample-efficient Bayesian optimization, for handling performance and stability criteria. We introduce multiple computational and algorithmic modifications for computational efficiency and parallelization of optimization steps. We further evaluate the algorithm's performance on a real precision-motion system utilized in semiconductor industry applications by modifying the payload and reference stepsize and comparing it to an interpolated constrained optimization-based baseline approach.
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Apr 18, 2024



In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the \textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from \textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
Safe Risk-averse Bayesian Optimization for Controller Tuning
Jun 23, 2023Controller tuning and parameter optimization are crucial in system design to improve both the controller and underlying system performance. Bayesian optimization has been established as an efficient model-free method for controller tuning and adaptation. Standard methods, however, are not enough for high-precision systems to be robust with respect to unknown input-dependent noise and stable under safety constraints. In this work, we present a novel data-driven approach, RaGoOSE, for safe controller tuning in the presence of heteroscedastic noise, combining safe learning with risk-averse Bayesian optimization. We demonstrate the method for synthetic benchmark and compare its performance to established BO-based tuning methods. We further evaluate RaGoOSE performance on a real precision-motion system utilized in semiconductor industry applications and compare it to the built-in auto-tuning routine.
Drone-based Volume Estimation in Indoor Environments
Nov 15, 2022



Volume estimation in large indoor spaces is an important challenge in robotic inspection of industrial warehouses. We propose an approach for volume estimation for autonomous systems using visual features for indoor localization and surface reconstruction from 2D-LiDAR measurements. A Gaussian Process-based model incorporates information collected from measurements given statistical prior information about the terrain, from which the volume estimate is computed. Our algorithm finds feasible trajectories which minimize the uncertainty of the volume estimate. We show results in simulation for the surface reconstruction and volume estimate of topographic data.