 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Material Point Method for the Control of Deformable Objects
Dec 15, 2025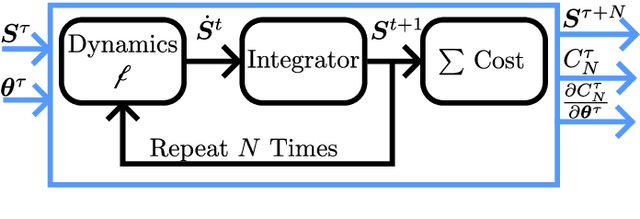
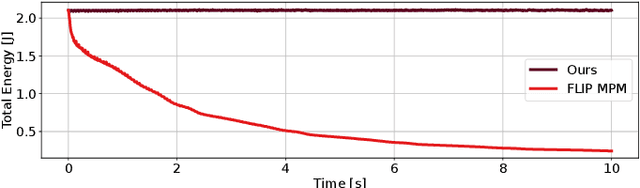
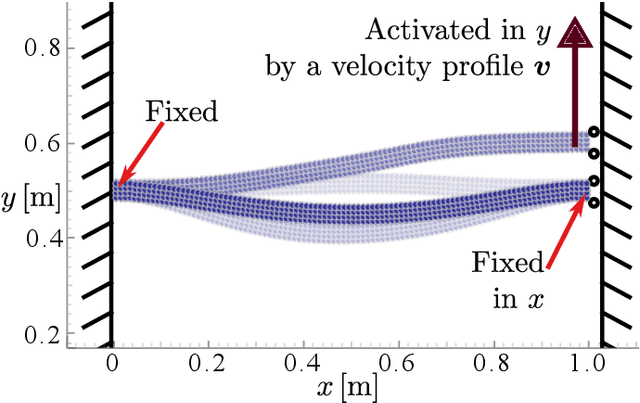
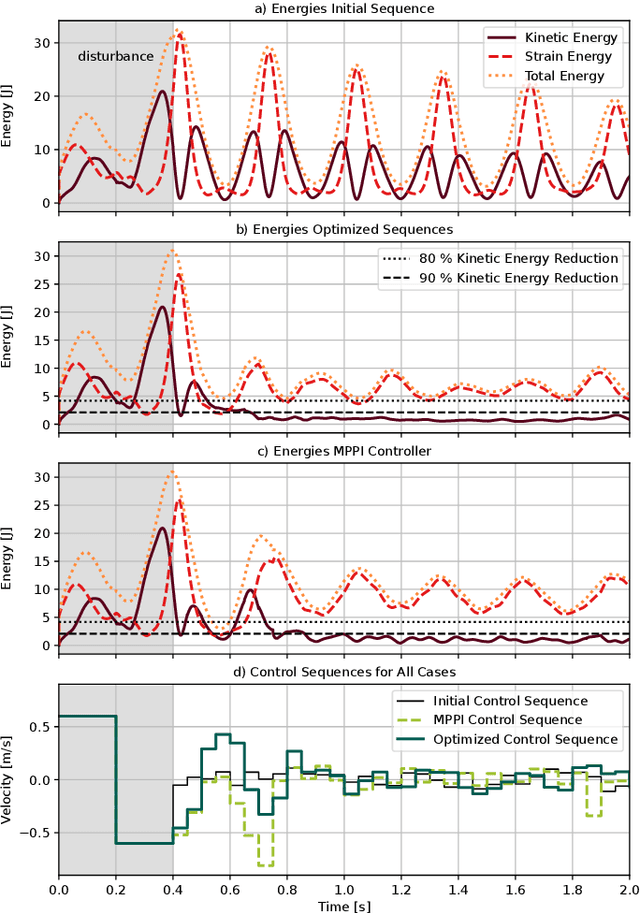
Controlling the deformation of flexible objects is challenging due to their non-linear dynamics and high-dimensional configuration space. This work presents a differentiable Material Point Method (MPM) simulator targeted at control applications. We exploit the differentiability of the simulator to optimize a control trajectory in an active damping problem for a hyperelastic rope. The simulator effectively minimizes the kinetic energy of the rope around 2$\times$ faster than a baseline MPPI method and to a 20% lower energy level, while using about 3% of the computation time.
Fully-Decentralized MADDPG with Networked Agents
Mar 09, 2025



In this paper, we devise three actor-critic algorithms with decentralized training for multi-agent reinforcement learning in cooperative, adversarial, and mixed settings with continuous action spaces. To this goal, we adapt the MADDPG algorithm by applying a networked communication approach between agents. We introduce surrogate policies in order to decentralize the training while allowing for local communication during training. The decentralized algorithms achieve comparable results to the original MADDPG in empirical tests, while reducing computational cost. This is more pronounced with larger numbers of agents.