 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboAtlas: Contextual Active SLAM
Jun 24, 2026We present RoboAtlas, a contextual Active SLAM framework that adaptively balances geometric exploration and semantic reasoning using a scalable 3D semantic mapping system, OpenRoboVox. RoboAtlas integrates frontier exploration, global semantic-map reasoning, and egocentric VLM-based reasoning through a contextual multi-armed bandit that transitions from exploration to semantically guided navigation as scene understanding improves. We evaluate the system in simulation and on a Unitree Go2 robot in large-scale real-world environments exceeding 1800 m2 with approx. 30k mapped semantic instances, achieving a 100% task success rate. On the GOAT-Bench "Val Unseen" benchmark, RoboAtlas achieves state-of-the-art performance with highest reported success rate (SR) of 90.6%, using GPT-4o, improving over the strongest prior baseline by 17.8 percentage points in SR. Using the much smaller Qwen2.5-VL-7B model, it still achieves 88.8% SR, outperforming all baselines using GPT-4o in SR, and revealing the importance of the information gained by our semantic mapping framework over simply replacing the underlying foundation model. The results demonstrate that grounding foundation models with large-scale 3D semantic maps enables robust and efficient contextual Active SLAM.
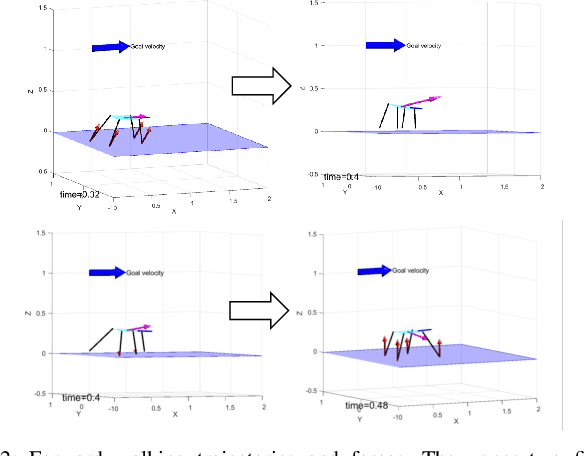
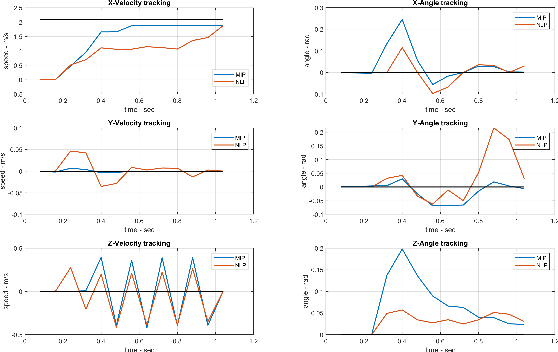
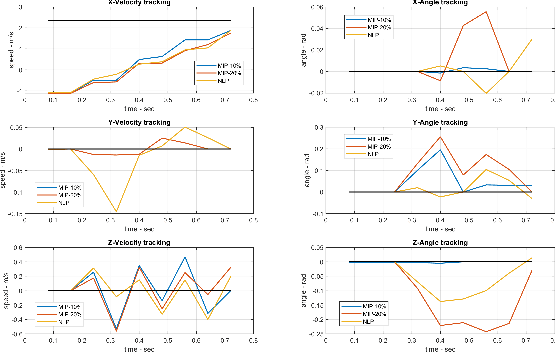
Safe Whole-Body Loco-Manipulation via Combined Model and Learning-based Control
Mar 02, 2026Simultaneous locomotion and manipulation enables robots to interact with their environment beyond the constraints of a fixed base. However, coordinating legged locomotion with arm manipulation, while considering safety and compliance during contact interaction remains challenging. To this end, we propose a whole-body controller that combines a model-based admittance control for the manipulator arm with a Reinforcement Learning (RL) policy for legged locomotion. The admittance controller maps external wrenches--such as those applied by a human during physical interaction--into desired end-effector velocities, allowing for compliant behavior. The velocities are tracked jointly by the arm and leg controllers, enabling a unified 6-DoF force response. The model-based design permits accurate force control and safety guarantees via a Reference Governor (RG), while robustness is further improved by a Kalman filter enhanced with neural networks for reliable base velocity estimation. We validate our approach in both simulation and hardware using the Unitree Go2 quadruped robot with a 6-DoF arm and wrist-mounted 6-DoF Force/Torque sensor. Results demonstrate accurate tracking of interaction-driven velocities, compliant behavior, and safe, reliable performance in dynamic settings.
PRISM: Performer RS-IMLE for Single-pass Multisensory Imitation Learning
Feb 02, 2026Robotic imitation learning typically requires models that capture multimodal action distributions while operating at real-time control rates and accommodating multiple sensing modalities. Although recent generative approaches such as diffusion models, flow matching, and Implicit Maximum Likelihood Estimation (IMLE) have achieved promising results, they often satisfy only a subset of these requirements. To address this, we introduce PRISM, a single-pass policy based on a batch-global rejection-sampling variant of IMLE. PRISM couples a temporal multisensory encoder (integrating RGB, depth, tactile, audio, and proprioception) with a linear-attention generator using a Performer architecture. We demonstrate the efficacy of PRISM on a diverse real-world hardware suite, including loco-manipulation using a Unitree Go2 with a 7-DoF arm D1 and tabletop manipulation with a UR5 manipulator. Across challenging physical tasks such as pre-manipulation parking, high-precision insertion, and multi-object pick-and-place, PRISM outperforms state-of-the-art diffusion policies by 10-25% in success rate while maintaining high-frequency (30-50 Hz) closed-loop control. We further validate our approach on large-scale simulation benchmarks, including CALVIN, MetaWorld, and Robomimic. In CALVIN (10% data split), PRISM improves success rates by approximately 25% over diffusion and approximately 20% over flow matching, while simultaneously reducing trajectory jerk by 20x-50x. These results position PRISM as a fast, accurate, and multisensory imitation policy that retains multimodal action coverage without the latency of iterative sampling.
Energy-Efficient Motion Planner for Legged Robots
Mar 08, 2025We propose an online motion planner for legged robot locomotion with the primary objective of achieving energy efficiency. The conceptual idea is to leverage a placement set of footstep positions based on the robot's body position to determine when and how to execute steps. In particular, the proposed planner uses virtual placement sets beneath the hip joints of the legs and executes a step when the foot is outside of such placement set. Furthermore, we propose a parameter design framework that considers both energy-efficiency and robustness measures to optimize the gait by changing the shape of the placement set along with other parameters, such as step height and swing time, as a function of walking speed. We show that the planner produces trajectories that have a low Cost of Transport (CoT) and high robustness measure, and evaluate our approach against model-free Reinforcement Learning (RL) and motion imitation using biological dog motion priors as the reference. Overall, within low to medium velocity range, we show a 50.4% improvement in CoT and improved robustness over model-free RL, our best performing baseline. Finally, we show ability to handle slippery surfaces, gait transitions, and disturbances in simulation and hardware with the Unitree A1 robot.
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Jan 31, 2024State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
SCALER: Versatile Multi-Limbed Robot for Free-Climbing in Extreme Terrains
Dec 08, 2023This paper presents SCALER, a versatile free-climbing multi-limbed robot that is designed to achieve tightly coupled simultaneous locomotion and dexterous grasping. Although existing quadruped-limbed robots have shown impressive dexterous skills such as object manipulation, it is essential to balance power-intensive locomotion and dexterous grasping capabilities. We design a torso linkage and a parallel-serial limb to meet such conflicting skills that pose unique challenges in the hardware designs. SCALER employs underactuated two-fingered GOAT grippers that can mechanically adapt and offer 7 modes of grasping, enabling SCALER to traverse extreme terrains with multi-modal grasping strategies. We study the whole-body approach, where SCALER uses its body and limbs to generate additional forces for stable grasping with environments, further enhancing versatility. Furthermore, we improve the GOAT gripper actuation speed to realize more dynamic climbing in a closed-loop control fashion. With these proposed technologies, SCALER can traverse vertical, overhang, upside-down, slippery terrains, and bouldering walls with non-convex-shaped climbing holds under the Earth's gravity.
Real-to-Sim: Deep Learning with Auto-Tuning to Predict Residual Errors using Sparse Data
Sep 07, 2022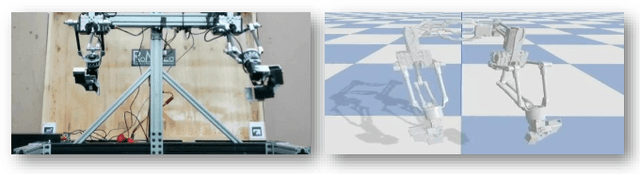
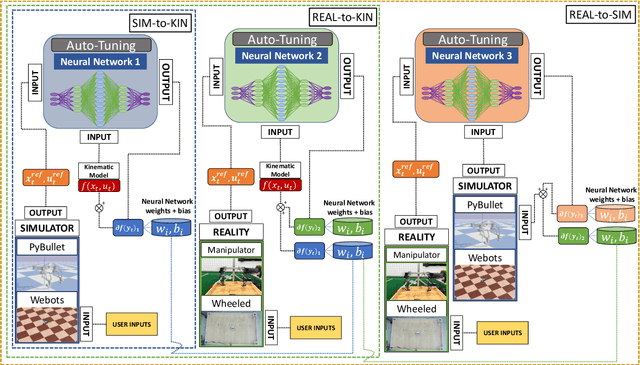
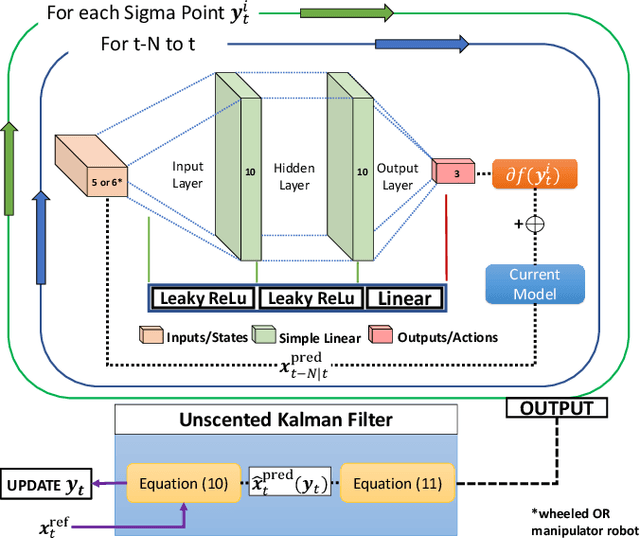
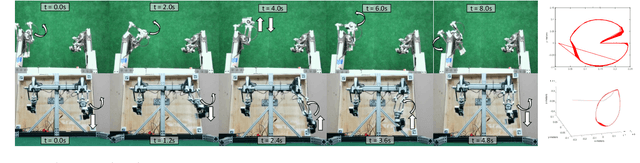
Achieving highly accurate kinematic or simulator models that are close to the real robot can facilitate model-based controls (e.g., model predictive control or linear-quadradic regulators), model-based trajectory planning (e.g., trajectory optimization), and decrease the amount of learning time necessary for reinforcement learning methods. Thus, the objective of this work is to learn the residual errors between a kinematic and/or simulator model and the real robot. This is achieved using auto-tuning and neural networks, where the parameters of a neural network are updated using an auto-tuning method that applies equations from an Unscented Kalman Filter (UKF) formulation. Using this method, we model these residual errors with only small amounts of data - a necessity as we improve the simulator/kinematic model by learning directly from hardware operation. We demonstrate our method on robotic hardware (e.g., manipulator arm), and show that with the learned residual errors, we can further close the reality gap between kinematic models, simulations, and the real robot.
Learning Near-global-optimal Strategies for Hybrid Non-convex Model Predictive Control of Single Rigid Body Locomotion
Jul 16, 2022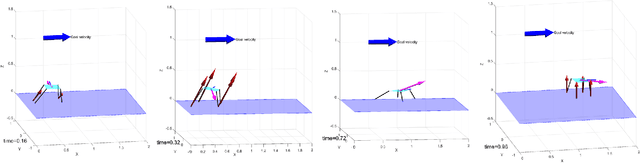
Convex model predictive controls (MPCs) with a single rigid body model have demonstrated strong performance on real legged robots. However, convex MPCs are limited by their assumptions such as small rotation angle and pre-defined gait, limiting the richness of potential solutions. We remove those assumptions and solve the complete mixed-integer non-convex programming with single rigid body model. We first collect datasets of pre-solved problems offline, then learn the problem-solution map to solve this optimization fast for MPC. If warm-starts can be found, offline problems can be solved close to the global optimality. The proposed controller is tested by generating various gaits and behaviors depending on the initial conditions. Hardware test demonstrates online gait generation and adaptation running at more than 50 Hz based on sensor feedback.
Auto-Calibrating Admittance Controller for Robust Motion of Robotic Systems
Jul 06, 2022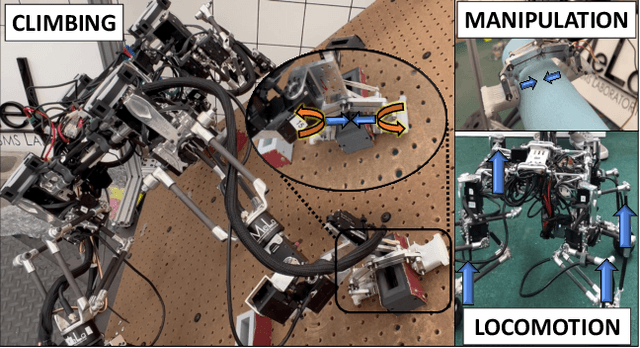
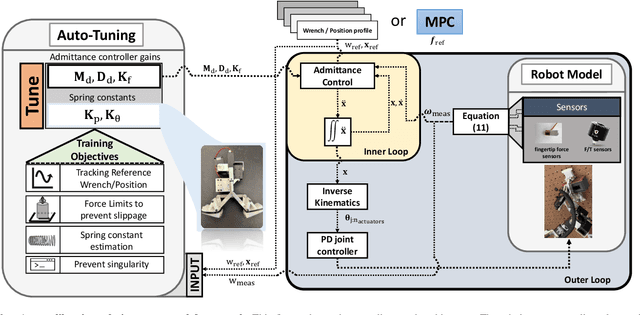
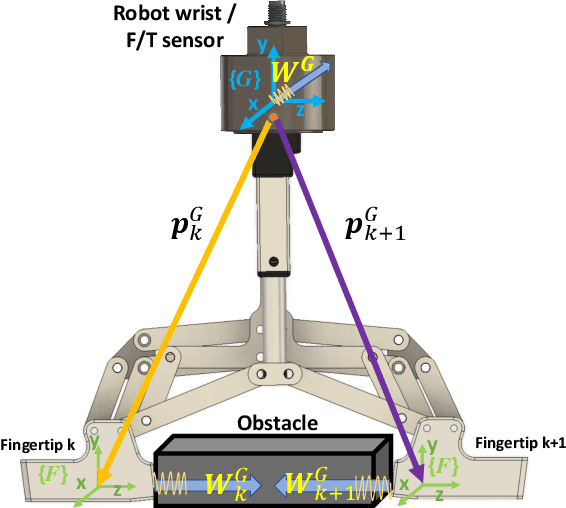
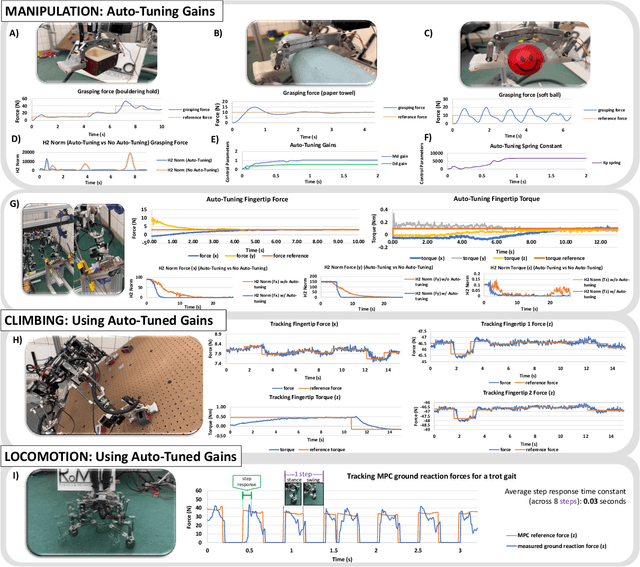
We demonstrate an admittance controller with auto-tuning that can be applied for single and multi-point contact robots (e.g., legged robots with point feet or multi-finger grippers). The controller's objective is to track wrench profiles of each contact point while considering the additional torque due to rotational friction. Our admittance controller is adaptive during online operation by using an auto-tuning method that tunes the gains of the controller while following several training objectives that facilitate controller stability, such as tracking the wrench profile as closely as possible, ensuring control outputs that are within force limits that minimize slippage, and avoids kinematic singularity. We demonstrate the robustness of our controller on hardware for both manipulation and locomotion tasks using a multi-limbed climbing robot.
Simultaneous Contact-Rich Grasping and Locomotion via Distributed Optimization Enabling Free-Climbing for Multi-Limbed Robots
Jul 05, 2022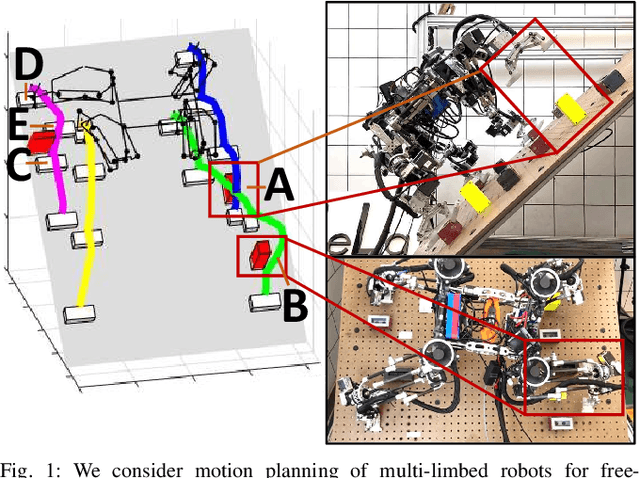
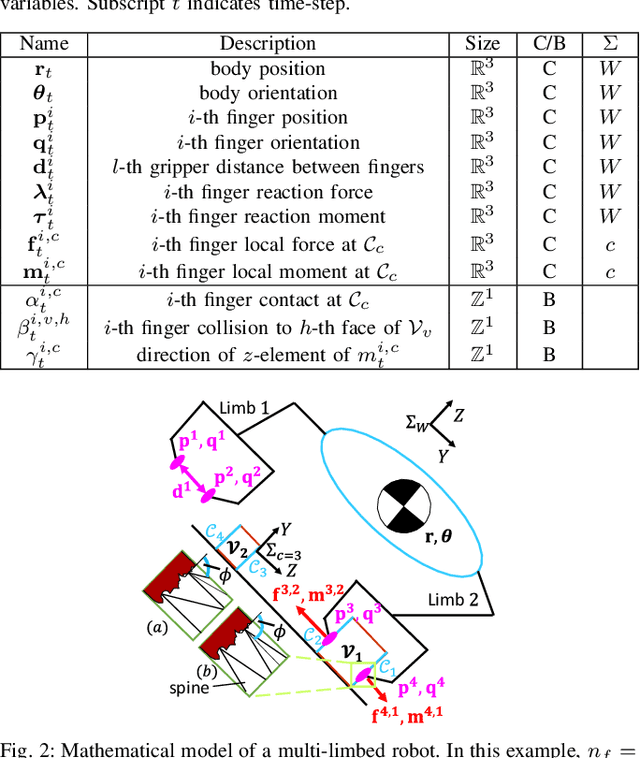
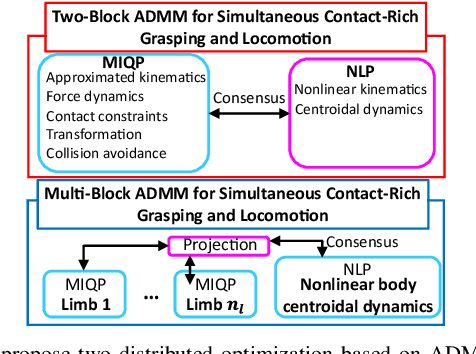
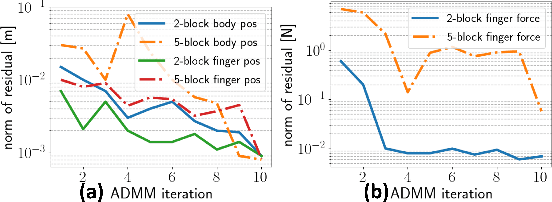
While motion planning of locomotion for legged robots has shown great success, motion planning for legged robots with dexterous multi-finger grasping is not mature yet. We present an efficient motion planning framework for simultaneously solving locomotion (e.g., centroidal dynamics), grasping (e.g., patch contact), and contact (e.g., gait) problems. To accelerate the planning process, we propose distributed optimization frameworks based on Alternating Direction Methods of Multipliers (ADMM) to solve the original large-scale Mixed-Integer NonLinear Programming (MINLP). The resulting frameworks use Mixed-Integer Quadratic Programming (MIQP) to solve contact and NonLinear Programming (NLP) to solve nonlinear dynamics, which are more computationally tractable and less sensitive to parameters. Also, we explicitly enforce patch contact constraints from limit surfaces with micro-spine grippers. We demonstrate our proposed framework in the hardware experiments, showing that the multi-limbed robot is able to realize various motions including free-climbing at a slope angle 45{\deg} with a much shorter planning time.