 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTIDE: Asymmetric Neural Circuits for Stabilized Temporal Inhibitory-Excitatory Dynamics
May 19, 2026Recent Continuous Thought Machine architecture decouples internal computation from external inputs via neural dynamics, but relies on multi-layer perceptrons without stability guarantees. We propose to model neural dynamics using asymmetric Excitatory-Inhibitory (E-I) networks, which can be stabilized via principles from network theory and can be expressed as energy-based systems optimized through a game-theoretic loss. Building on this perspective, we introduce Temporal Inhibitory-Excitatory Dynamic Engine (TIDE), a neuro-inspired architecture that computes internal representations through neural dynamics stabilized by incorporating the Wilson-Cowan dynamics and lateral inhibition. TIDE balances biological realism by, for instance, using Hierarchical Receptive Fields and enforcing Dale's principle to ensure a realistic $80:20$ E-I balance ratio with an end-to-end trainable architecture. The aim of this paper is to introduce a new architecture that brings neuro-inspired learning to the forefront. We present proofs of convergence, stability, and complexity bounds, along with empirical ablation studies. Overall, TIDE surpasses CTM with under $50\%$ of the training time and improves $\texttt{top-1}$ accuracy by an average of $+1.65\%$ on ImageNet under various perturbations.
Autonomous Point Cloud Segmentation for Power Lines Inspection in Smart Grid
Aug 14, 2023



LiDAR is currently one of the most utilized sensors to effectively monitor the status of power lines and facilitate the inspection of remote power distribution networks and related infrastructures. To ensure the safe operation of the smart grid, various remote data acquisition strategies, such as Airborne Laser Scanning (ALS), Mobile Laser Scanning (MLS), and Terrestrial Laser Scanning (TSL) have been leveraged to allow continuous monitoring of regional power networks, which are typically surrounded by dense vegetation. In this article, an unsupervised Machine Learning (ML) framework is proposed, to detect, extract and analyze the characteristics of power lines of both high and low voltage, as well as the surrounding vegetation in a Power Line Corridor (PLC) solely from LiDAR data. Initially, the proposed approach eliminates the ground points from higher elevation points based on statistical analysis that applies density criteria and histogram thresholding. After denoising and transforming of the remaining candidate points by applying Principle Component Analysis (PCA) and Kd-tree, power line segmentation is achieved by utilizing a two-stage DBSCAN clustering to identify each power line individually. Finally, all high elevation points in the PLC are identified based on their distance to the newly segmented power lines. Conducted experiments illustrate that the proposed framework is an agnostic method that can efficiently detect the power lines and perform PLC-based hazard analysis.
Efficient Real-time Smoke Filtration with 3D LiDAR for Search and Rescue with Autonomous Heterogeneous Robotic Systems
Aug 14, 2023
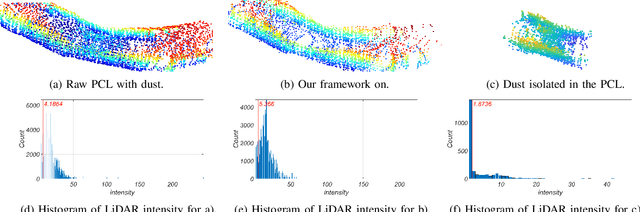


Search and Rescue (SAR) missions in harsh and unstructured Sub-Terranean (Sub-T) environments in the presence of aerosol particles have recently become the main focus in the field of robotics. Aerosol particles such as smoke and dust directly affect the performance of any mobile robotic platform due to their reliance on their onboard perception systems for autonomous navigation and localization in Global Navigation Satellite System (GNSS)-denied environments. Although obstacle avoidance and object detection algorithms are robust to the presence of noise to some degree, their performance directly relies on the quality of captured data by onboard sensors such as Light Detection And Ranging (LiDAR) and camera. Thus, this paper proposes a novel modular agnostic filtration pipeline based on intensity and spatial information such as local point density for removal of detected smoke particles from Point Cloud (PCL) prior to its utilization for collision detection. Furthermore, the efficacy of the proposed framework in the presence of smoke during multiple frontier exploration missions is investigated while the experimental results are presented to facilitate comparison with other methodologies and their computational impact. This provides valuable insight to the research community for better utilization of filtration schemes based on available computation resources while considering the safe autonomous navigation of mobile robots.
Multimodal Dataset from Harsh Sub-Terranean Environment with Aerosol Particles for Frontier Exploration
Apr 27, 2023



Algorithms for autonomous navigation in environments without Global Navigation Satellite System (GNSS) coverage mainly rely on onboard perception systems. These systems commonly incorporate sensors like cameras and LiDARs, the performance of which may degrade in the presence of aerosol particles. Thus, there is a need of fusing acquired data from these sensors with data from RADARs which can penetrate through such particles. Overall, this will improve the performance of localization and collision avoidance algorithms under such environmental conditions. This paper introduces a multimodal dataset from the harsh and unstructured underground environment with aerosol particles. A detailed description of the onboard sensors and the environment, where the dataset is collected are presented to enable full evaluation of acquired data. Furthermore, the dataset contains synchronized raw data measurements from all onboard sensors in Robot Operating System (ROS) format to facilitate the evaluation of navigation, and localization algorithms in such environments. In contrast to the existing datasets, the focus of this paper is not only to capture both temporal and spatial data diversities but also to present the impact of harsh conditions on captured data. Therefore, to validate the dataset, a preliminary comparison of odometry from onboard LiDARs is presented.