 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Deep Reinforcement Learning to Learn High-Level Policies on the ATRIAS Biped
Sep 28, 2018


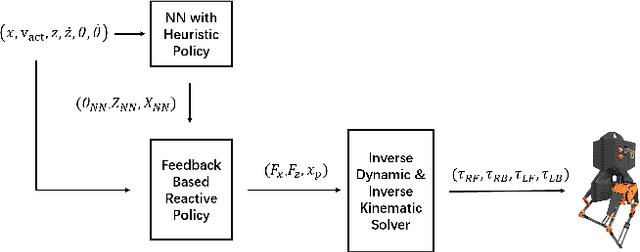
Learning controllers for bipedal robots is a challenging problem, often requiring expert knowledge and extensive tuning of parameters that vary in different situations. Recently, deep reinforcement learning has shown promise at automatically learning controllers for complex systems in simulation. This has been followed by a push towards learning controllers that can be transferred between simulation and hardware, primarily with the use of domain randomization. However, domain randomization can make the problem of finding stable controllers even more challenging, especially for underactuated bipedal robots. In this work, we explore whether policies learned in simulation can be transferred to hardware with the use of high-fidelity simulators and structured controllers. We learn a neural network policy which is a part of a more structured controller. While the neural network is learned in simulation, the rest of the controller stays fixed, and can be tuned by the expert as needed. We show that using this approach can greatly speed up the rate of learning in simulation, as well as enable transfer of policies between simulation and hardware. We present our results on an ATRIAS robot and explore the effect of action spaces and cost functions on the rate of transfer between simulation and hardware. Our results show that structured policies can indeed be learned in simulation and implemented on hardware successfully. This has several advantages, as the structure preserves the intuitive nature of the policy, and the neural network improves the performance of the hand-designed policy. In this way, we propose a way of using neural networks to improve expert designed controllers, while maintaining ease of understanding.
Using Simulation to Improve Sample-Efficiency of Bayesian Optimization for Bipedal Robots
May 07, 2018
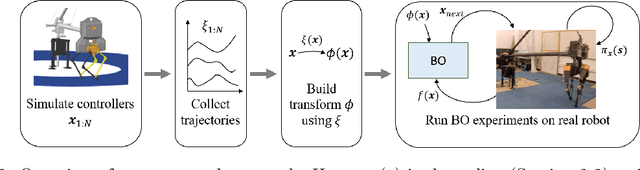
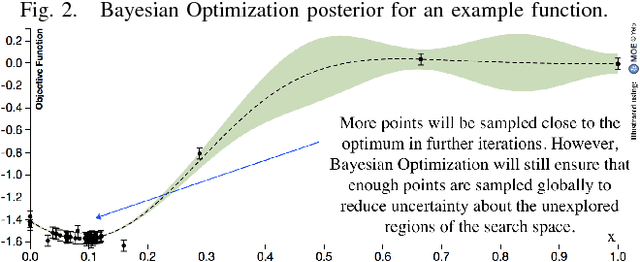
Learning for control can acquire controllers for novel robotic tasks, paving the path for autonomous agents. Such controllers can be expert-designed policies, which typically require tuning of parameters for each task scenario. In this context, Bayesian optimization (BO) has emerged as a promising approach for automatically tuning controllers. However, when performing BO on hardware for high-dimensional policies, sample-efficiency can be an issue. Here, we develop an approach that utilizes simulation to map the original parameter space into a domain-informed space. During BO, similarity between controllers is now calculated in this transformed space. Experiments on the ATRIAS robot hardware and another bipedal robot simulation show that our approach succeeds at sample-efficiently learning controllers for multiple robots. Another question arises: What if the simulation significantly differs from hardware? To answer this, we create increasingly approximate simulators and study the effect of increasing simulation-hardware mismatch on the performance of Bayesian optimization. We also compare our approach to other approaches from literature, and find it to be more reliable, especially in cases of high mismatch. Our experiments show that our approach succeeds across different controller types, bipedal robot models and simulator fidelity levels, making it applicable to a wide range of bipedal locomotion problems.
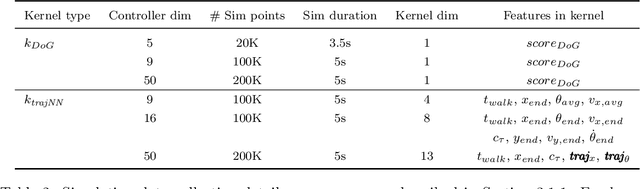
Deep Kernels for Optimizing Locomotion Controllers
Nov 08, 2017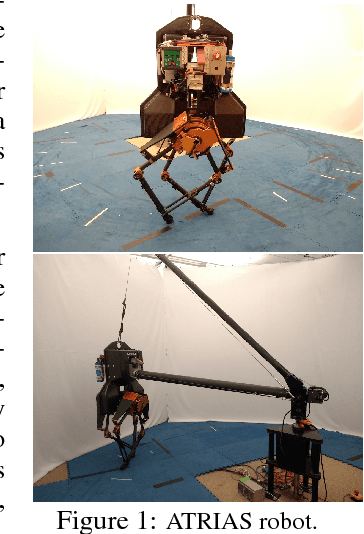
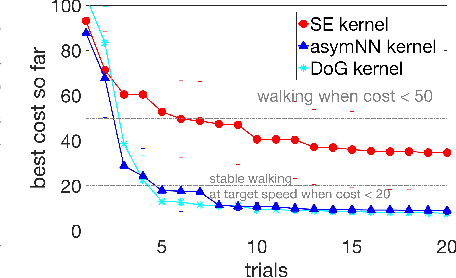
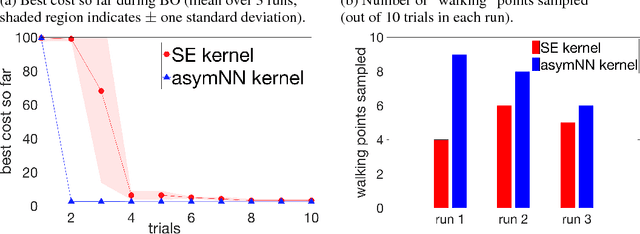
Sample efficiency is important when optimizing parameters of locomotion controllers, since hardware experiments are time consuming and expensive. Bayesian Optimization, a sample-efficient optimization framework, has recently been widely applied to address this problem, but further improvements in sample efficiency are needed for practical applicability to real-world robots and high-dimensional controllers. To address this, prior work has proposed using domain expertise for constructing custom distance metrics for locomotion. In this work we show how to learn such a distance metric automatically. We use a neural network to learn an informed distance metric from data obtained in high-fidelity simulations. We conduct experiments on two different controllers and robot architectures. First, we demonstrate improvement in sample efficiency when optimizing a 5-dimensional controller on the ATRIAS robot hardware. We then conduct simulation experiments to optimize a 16-dimensional controller for a 7-link robot model and obtain significant improvements even when optimizing in perturbed environments. This demonstrates that our approach is able to enhance sample efficiency for two different controllers, hence is a fitting candidate for further experiments on hardware in the future.
* (Rika Antonova and Akshara Rai contributed equally)
Bayesian Optimization Using Domain Knowledge on the ATRIAS Biped
Sep 18, 2017
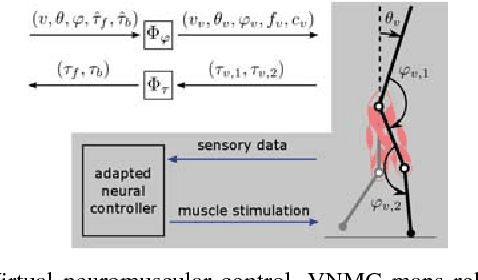
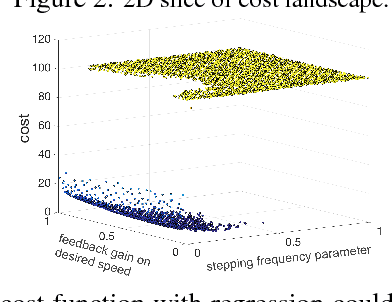
Controllers in robotics often consist of expert-designed heuristics, which can be hard to tune in higher dimensions. It is typical to use simulation to learn these parameters, but controllers learned in simulation often don't transfer to hardware. This necessitates optimization directly on hardware. However, collecting data on hardware can be expensive. This has led to a recent interest in adapting data-efficient learning techniques to robotics. One popular method is Bayesian Optimization (BO), a sample-efficient black-box optimization scheme, but its performance typically degrades in higher dimensions. We aim to overcome this problem by incorporating domain knowledge to reduce dimensionality in a meaningful way, with a focus on bipedal locomotion. In previous work, we proposed a transformation based on knowledge of human walking that projected a 16-dimensional controller to a 1-dimensional space. In simulation, this showed enhanced sample efficiency when optimizing human-inspired neuromuscular walking controllers on a humanoid model. In this paper, we present a generalized feature transform applicable to non-humanoid robot morphologies and evaluate it on the ATRIAS bipedal robot -- in simulation and on hardware. We present three different walking controllers; two are evaluated on the real robot. Our results show that this feature transform captures important aspects of walking and accelerates learning on hardware and simulation, as compared to traditional BO.
Learning Feedback Terms for Reactive Planning and Control
Mar 03, 2017
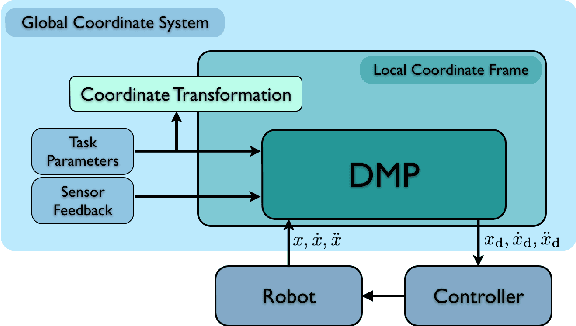


With the advancement of robotics, machine learning, and machine perception, increasingly more robots will enter human environments to assist with daily tasks. However, dynamically-changing human environments requires reactive motion plans. Reactivity can be accomplished through replanning, e.g. model-predictive control, or through a reactive feedback policy that modifies on-going behavior in response to sensory events. In this paper, we investigate how to use machine learning to add reactivity to a previously learned nominal skilled behavior. We approach this by learning a reactive modification term for movement plans represented by nonlinear differential equations. In particular, we use dynamic movement primitives (DMPs) to represent a skill and a neural network to learn a reactive policy from human demonstrations. We use the well explored domain of obstacle avoidance for robot manipulation as a test bed. Our approach demonstrates how a neural network can be combined with physical insights to ensure robust behavior across different obstacle settings and movement durations. Evaluations on an anthropomorphic robotic system demonstrate the effectiveness of our work.
Sample Efficient Optimization for Learning Controllers for Bipedal Locomotion
Oct 15, 2016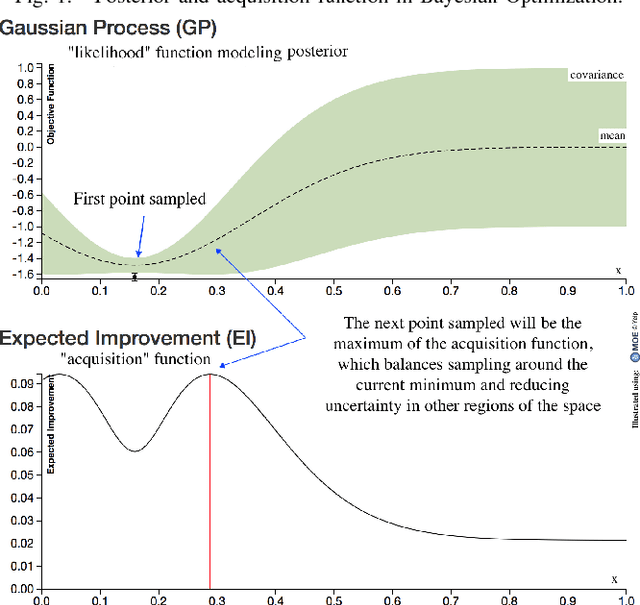
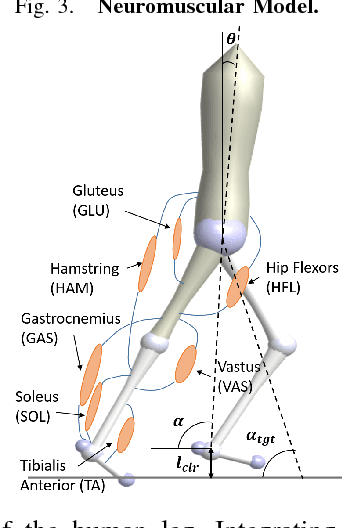
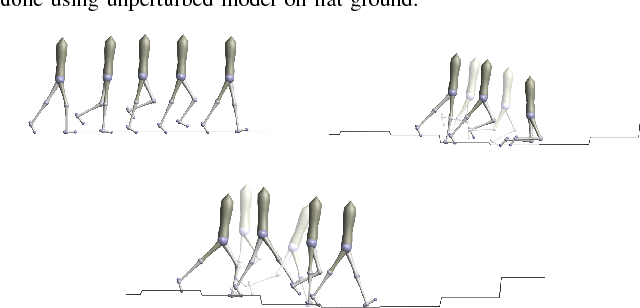
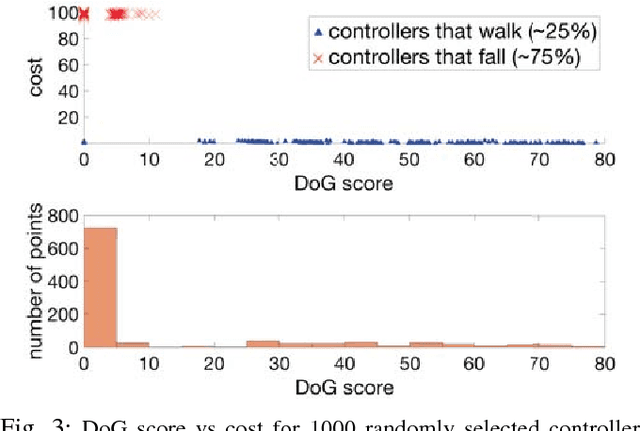
Learning policies for bipedal locomotion can be difficult, as experiments are expensive and simulation does not usually transfer well to hardware. To counter this, we need al- gorithms that are sample efficient and inherently safe. Bayesian Optimization is a powerful sample-efficient tool for optimizing non-convex black-box functions. However, its performance can degrade in higher dimensions. We develop a distance metric for bipedal locomotion that enhances the sample-efficiency of Bayesian Optimization and use it to train a 16 dimensional neuromuscular model for planar walking. This distance metric reflects some basic gait features of healthy walking and helps us quickly eliminate a majority of unstable controllers. With our approach we can learn policies for walking in less than 100 trials for a range of challenging settings. In simulation, we show results on two different costs and on various terrains including rough ground and ramps, sloping upwards and downwards. We also perturb our models with unknown inertial disturbances analogous with differences between simulation and hardware. These results are promising, as they indicate that this method can potentially be used to learn control policies on hardware.