 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure-Informed Deep Reinforcement Learning for Inventory Management
Jul 29, 2025


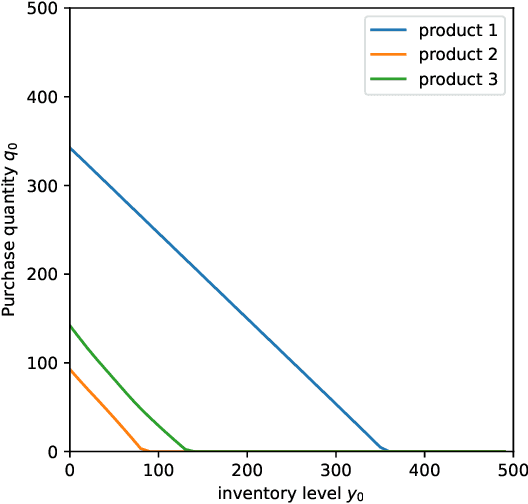
This paper investigates the application of Deep Reinforcement Learning (DRL) to classical inventory management problems, with a focus on practical implementation considerations. We apply a DRL algorithm based on DirectBackprop to several fundamental inventory management scenarios including multi-period systems with lost sales (with and without lead times), perishable inventory management, dual sourcing, and joint inventory procurement and removal. The DRL approach learns policies across products using only historical information that would be available in practice, avoiding unrealistic assumptions about demand distributions or access to distribution parameters. We demonstrate that our generic DRL implementation performs competitively against or outperforms established benchmarks and heuristics across these diverse settings, while requiring minimal parameter tuning. Through examination of the learned policies, we show that the DRL approach naturally captures many known structural properties of optimal policies derived from traditional operations research methods. To further improve policy performance and interpretability, we propose a Structure-Informed Policy Network technique that explicitly incorporates analytically-derived characteristics of optimal policies into the learning process. This approach can help interpretability and add robustness to the policy in out-of-sample performance, as we demonstrate in an example with realistic demand data. Finally, we provide an illustrative application of DRL in a non-stationary setting. Our work bridges the gap between data-driven learning and analytical insights in inventory management while maintaining practical applicability.
Flipping Coins to Estimate Pseudocounts for Exploration in Reinforcement Learning
Jun 05, 2023We propose a new method for count-based exploration in high-dimensional state spaces. Unlike previous work which relies on density models, we show that counts can be derived by averaging samples from the Rademacher distribution (or coin flips). This insight is used to set up a simple supervised learning objective which, when optimized, yields a state's visitation count. We show that our method is significantly more effective at deducing ground-truth visitation counts than previous work; when used as an exploration bonus for a model-free reinforcement learning algorithm, it outperforms existing approaches on most of 9 challenging exploration tasks, including the Atari game Montezuma's Revenge.
Scaling Goal-based Exploration via Pruning Proto-goals
Feb 09, 2023


One of the gnarliest challenges in reinforcement learning (RL) is exploration that scales to vast domains, where novelty-, or coverage-seeking behaviour falls short. Goal-directed, purposeful behaviours are able to overcome this, but rely on a good goal space. The core challenge in goal discovery is finding the right balance between generality (not hand-crafted) and tractability (useful, not too many). Our approach explicitly seeks the middle ground, enabling the human designer to specify a vast but meaningful proto-goal space, and an autonomous discovery process to refine this to a narrower space of controllable, reachable, novel, and relevant goals. The effectiveness of goal-conditioned exploration with the latter is then demonstrated in three challenging environments.