 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Predictive Control Barrier Functions: Towards Scalable Safety Certification in Modular Multi-Agent Systems
Mar 31, 2026We consider safety-critical multi-agent systems with distributed control architectures and potentially varying network topologies. While learning-based distributed control enables scalability and high performance, a lack of formal safety guarantees in the face of unforeseen disturbances and unsafe network topology changes may lead to system failure. To address this challenge, we introduce structured control barrier functions (s-CBFs) as a multi-agent safety framework. The s-CBFs are augmented to a distributed predictive control barrier function (D-PCBF), a predictive, optimization-based safety layer that uses model predictions to guarantee recoverable safety at all times. The proposed approach enables a permissive yet formal plug-and-play protocol, allowing agents to join or leave the network while ensuring safety recovery if a change in network topology requires temporarily unsafe behavior. We validate the formulation through simulations and real-time experiments of a miniature race-car platoon.
Distributionally Robust Imitation Learning: Layered Control Architecture for Certifiable Autonomy
Dec 19, 2025Imitation learning (IL) enables autonomous behavior by learning from expert demonstrations. While more sample-efficient than comparative alternatives like reinforcement learning, IL is sensitive to compounding errors induced by distribution shifts. There are two significant sources of distribution shifts when using IL-based feedback laws on systems: distribution shifts caused by policy error and distribution shifts due to exogenous disturbances and endogenous model errors due to lack of learning. Our previously developed approaches, Taylor Series Imitation Learning (TaSIL) and $\mathcal{L}_1$ -Distributionally Robust Adaptive Control (\ellonedrac), address the challenge of distribution shifts in complementary ways. While TaSIL offers robustness against policy error-induced distribution shifts, \ellonedrac offers robustness against distribution shifts due to aleatoric and epistemic uncertainties. To enable certifiable IL for learned and/or uncertain dynamical systems, we formulate \textit{Distributionally Robust Imitation Policy (DRIP)} architecture, a Layered Control Architecture (LCA) that integrates TaSIL and~\ellonedrac. By judiciously designing individual layer-centric input and output requirements, we show how we can guarantee certificates for the entire control pipeline. Our solution paves the path for designing fully certifiable autonomy pipelines, by integrating learning-based components, such as perception, with certifiable model-based decision-making through the proposed LCA approach.
A Robust Task-Level Control Architecture for Learned Dynamical Systems
Nov 12, 2025Dynamical system (DS)-based learning from demonstration (LfD) is a powerful tool for generating motion plans in the operation (`task') space of robotic systems. However, the realization of the generated motion plans is often compromised by a ''task-execution mismatch'', where unmodeled dynamics, persistent disturbances, and system latency cause the robot's actual task-space state to diverge from the desired motion trajectory. We propose a novel task-level robust control architecture, L1-augmented Dynamical Systems (L1-DS), that explicitly handles the task-execution mismatch in tracking a nominal motion plan generated by any DS-based LfD scheme. Our framework augments any DS-based LfD model with a nominal stabilizing controller and an L1 adaptive controller. Furthermore, we introduce a windowed Dynamic Time Warping (DTW)-based target selector, which enables the nominal stabilizing controller to handle temporal misalignment for improved phase-consistent tracking. We demonstrate the efficacy of our architecture on the LASA and IROS handwriting datasets.
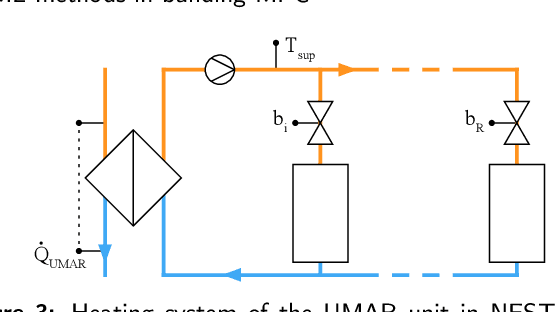
Physics-informed linear regression is a competitive approach compared to Machine Learning methods in building MPC
Oct 29, 2021


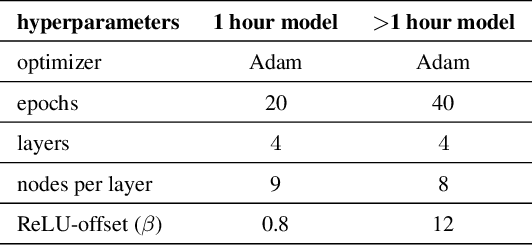
Because physics-based building models are difficult to obtain as each building is individual, there is an increasing interest in generating models suitable for building MPC directly from measurement data. Machine learning methods have been widely applied to this problem and validated mostly in simulation; there are, however, few studies on a direct comparison of different models or validation in real buildings to be found in the literature. Methods that are indeed validated in application often lead to computationally complex non-convex optimization problems. Here we compare physics-informed Autoregressive-Moving-Average with Exogenous Inputs (ARMAX) models to Machine Learning models based on Random Forests and Input Convex Neural Networks and the resulting convex MPC schemes in experiments on a practical building application with the goal of minimizing energy consumption while maintaining occupant comfort, and in a numerical case study. We demonstrate that Predictive Control in general leads to savings between 26% and 49% of heating and cooling energy, compared to the building's baseline hysteresis controller. Moreover, we show that all model types lead to satisfactory control performance in terms of constraint satisfaction and energy reduction. However, we also see that the physics-informed ARMAX models have a lower computational burden, and a superior sample efficiency compared to the Machine Learning based models. Moreover, even if abundant training data is available, the ARMAX models have a significantly lower prediction error than the Machine Learning models, which indicates that the encoded physics-based prior of the former cannot independently be found by the latter.
Input Convex Neural Networks for Building MPC
Nov 26, 2020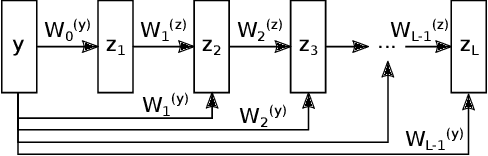
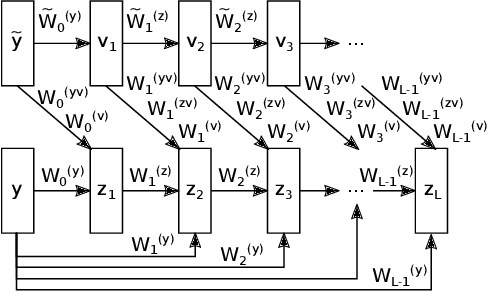
Model Predictive Control in buildings can significantly reduce their energy consumption. The cost and effort necessary for creating and maintaining first principle models for buildings make data-driven modelling an attractive alternative in this domain. In MPC the models form the basis for an optimization problem whose solution provides the control signals to be applied to the system. The fact that this optimization problem has to be solved repeatedly in real-time implies restrictions on the learning architectures that can be used. Here, we adapt Input Convex Neural Networks that are generally only convex for one-step predictions, for use in building MPC. We introduce additional constraints to their structure and weights to achieve a convex input-output relationship for multistep ahead predictions. We assess the consequences of the additional constraints for the model accuracy and test the models in a real-life MPC experiment in an apartment in Switzerland. In two five-day cooling experiments, MPC with Input Convex Neural Networks is able to keep room temperatures within comfort constraints while minimizing cooling energy consumption.