 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgiPIX: Bridging Simulation and Reality in Indoor Aerial Inspection
Apr 09, 2026Autonomous indoor flight for critical asset inspection presents fundamental challenges in perception, planning, control, and learning. Despite rapid progress, there is still a lack of a compact, active-sensing, open-source platform that is reproducible across simulation and real-world operation. To address this gap, we present Agipix, a co-designed open hardware and software platform for indoor aerial autonomy and critical asset inspection. Agipix features a compact, hardware-synchronized active-sensing platform with onboard GPU-accelerated compute that is capable of agile flight; a containerized ROS~2-based modular autonomy stack; and a photorealistic digital twin of the hardware platform together with a reliable UI. These elements enable rapid iteration via zero-shot transfer of containerized autonomy components between simulation and real flights. We demonstrate trajectory tracking and exploration performance using onboard sensing in industrial indoor environments. All hardware designs, simulation assets, and containerized software are released openly together with documentation.
Analyzing Data Efficiency and Performance of Machine Learning Algorithms for Assessing Low Back Pain Physical Rehabilitation Exercises
Aug 05, 2024



Analyzing human motion is an active research area, with various applications. In this work, we focus on human motion analysis in the context of physical rehabilitation using a robot coach system. Computer-aided assessment of physical rehabilitation entails evaluation of patient performance in completing prescribed rehabilitation exercises, based on processing movement data captured with a sensory system, such as RGB and RGB-D cameras. As 2D and 3D human pose estimation from RGB images had made impressive improvements, we aim to compare the assessment of physical rehabilitation exercises using movement data obtained from both RGB-D camera (Microsoft Kinect) and estimation from RGB videos (OpenPose and BlazePose algorithms). A Gaussian Mixture Model (GMM) is employed from position (and orientation) features, with performance metrics defined based on the log-likelihood values from GMM. The evaluation is performed on a medical database of clinical patients carrying out low back-pain rehabilitation exercises, previously coached by robot Poppy.
Exploratory Study: Children's with Autism Awareness of being Imitated by Nao Robot
Mar 07, 2020
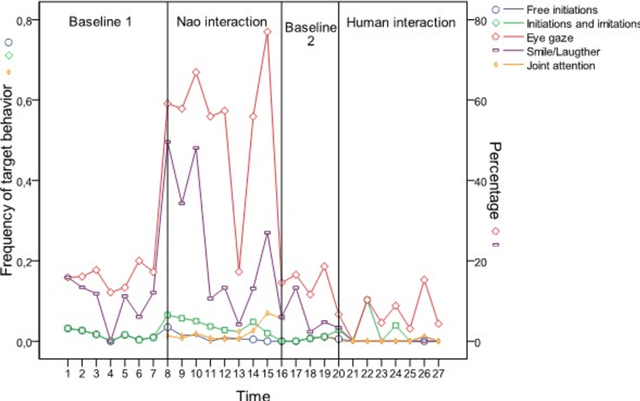
This paper presents an exploratory study designed for children with Autism Spectrum Disorders (ASD) that investigates children's awareness of being imitated by a robot in a play/game scenario. The Nao robot imitates all the arm movement behaviors of the child in real-time in dyadic and triadic interactions. Different behavioral criteria (i.e., eye gaze, gaze shifting, initiation and imitation of arm movements, smile/laughter) were analyzed based on the video data of the interaction. The results confirm only parts of the research hypothesis. However, these results are promising for the future directions of this work.
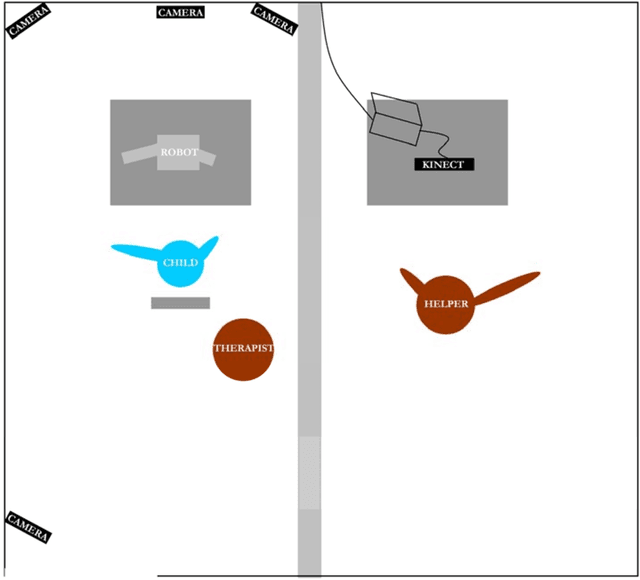
Social Engagement of Children with Autism during Interaction with a Robot
Feb 27, 2020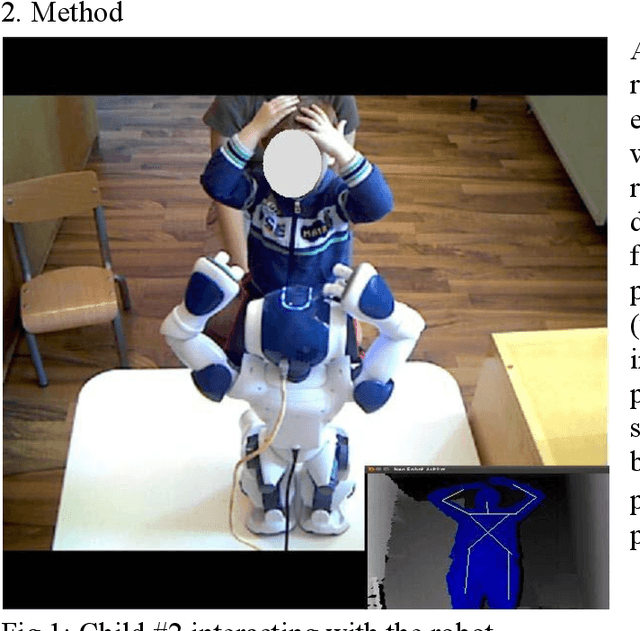
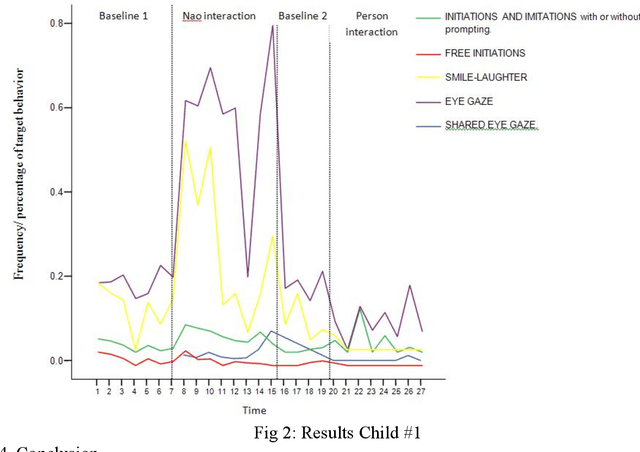
Imitation plays an important role in development, being one of the precursors of social cognition. Even though some children with autism imitate spontaneously and other children with autism can learn to imitate, the dynamics of imitation is affected in the large majority of cases. Existing studies from the literature suggest that robots can be used to teach children with autism basic interaction skills like imitation. Based on these findings, in this study, we investigate if children with autism show more social engagement when interacting with an imitative robot (Fig 1) compared to a human partner in a motor imitation task.