 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Learning Under Temporal Drift -- Mitigating Catastrophic Forgetting via Experience Replay
Jan 19, 2026Federated Learning struggles under temporal concept drift where client data distributions shift over time. We demonstrate that standard FedAvg suffers catastrophic forgetting under seasonal drift on Fashion-MNIST, with accuracy dropping from 74% to 28%. We propose client-side experience replay, where each client maintains a small buffer of past samples mixed with current data during local training. This simple approach requires no changes to server aggregation. Experiments show that a 50-sample-per-class buffer restores performance to 78-82%, effectively preventing forgetting. Our ablation study reveals a clear memory-accuracy trade-off as buffer size increases.
Probabilistic Digital Twins of Users: Latent Representation Learning with Statistically Validated Semantics
Dec 19, 2025Understanding user identity and behavior is central to applications such as personalization, recommendation, and decision support. Most existing approaches rely on deterministic embeddings or black-box predictive models, offering limited uncertainty quantification and little insight into what latent representations encode. We propose a probabilistic digital twin framework in which each user is modeled as a latent stochastic state that generates observed behavioral data. The digital twin is learned via amortized variational inference, enabling scalable posterior estimation while retaining a fully probabilistic interpretation. We instantiate this framework using a variational autoencoder (VAE) applied to a user-response dataset designed to capture stable aspects of user identity. Beyond standard reconstruction-based evaluation, we introduce a statistically grounded interpretation pipeline that links latent dimensions to observable behavioral patterns. By analyzing users at the extremes of each latent dimension and validating differences using nonparametric hypothesis tests and effect sizes, we demonstrate that specific dimensions correspond to interpretable traits such as opinion strength and decisiveness. Empirically, we find that user structure is predominantly continuous rather than discretely clustered, with weak but meaningful structure emerging along a small number of dominant latent axes. These results suggest that probabilistic digital twins can provide interpretable, uncertainty-aware representations that go beyond deterministic user embeddings.
Exploratory Study: Children's with Autism Awareness of being Imitated by Nao Robot
Mar 07, 2020
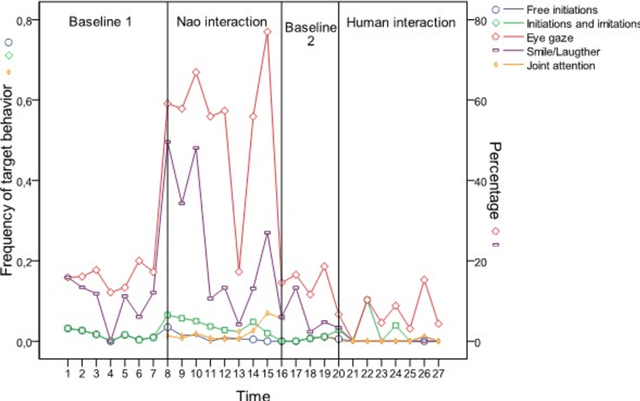
This paper presents an exploratory study designed for children with Autism Spectrum Disorders (ASD) that investigates children's awareness of being imitated by a robot in a play/game scenario. The Nao robot imitates all the arm movement behaviors of the child in real-time in dyadic and triadic interactions. Different behavioral criteria (i.e., eye gaze, gaze shifting, initiation and imitation of arm movements, smile/laughter) were analyzed based on the video data of the interaction. The results confirm only parts of the research hypothesis. However, these results are promising for the future directions of this work.
Social Engagement of Children with Autism during Interaction with a Robot
Feb 27, 2020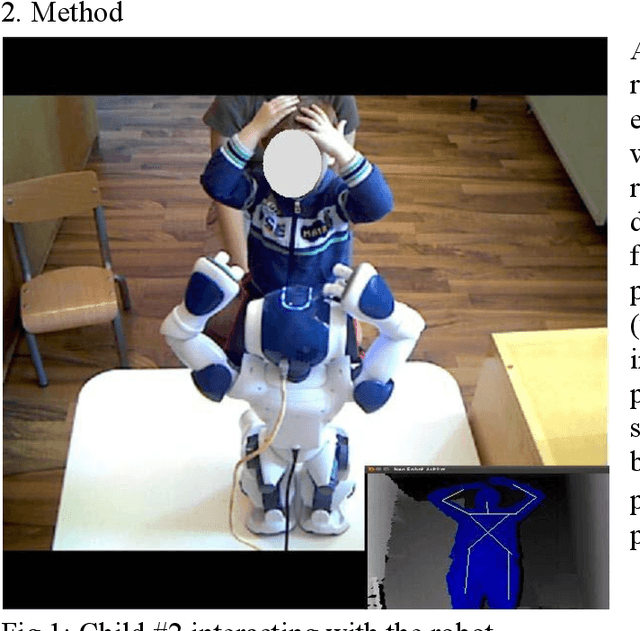
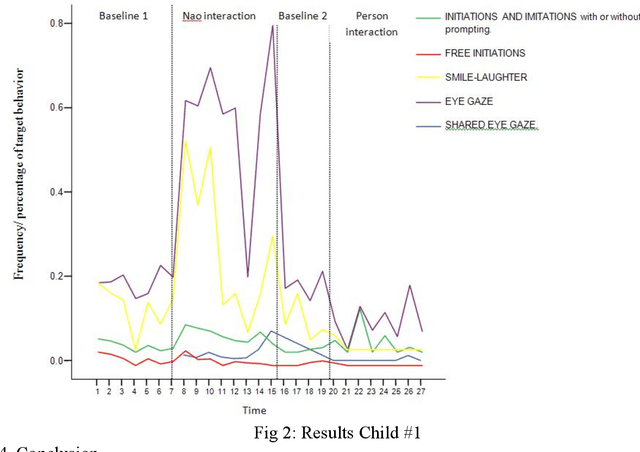
Imitation plays an important role in development, being one of the precursors of social cognition. Even though some children with autism imitate spontaneously and other children with autism can learn to imitate, the dynamics of imitation is affected in the large majority of cases. Existing studies from the literature suggest that robots can be used to teach children with autism basic interaction skills like imitation. Based on these findings, in this study, we investigate if children with autism show more social engagement when interacting with an imitative robot (Fig 1) compared to a human partner in a motor imitation task.