 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgiPIX: Bridging Simulation and Reality in Indoor Aerial Inspection
Apr 09, 2026Autonomous indoor flight for critical asset inspection presents fundamental challenges in perception, planning, control, and learning. Despite rapid progress, there is still a lack of a compact, active-sensing, open-source platform that is reproducible across simulation and real-world operation. To address this gap, we present Agipix, a co-designed open hardware and software platform for indoor aerial autonomy and critical asset inspection. Agipix features a compact, hardware-synchronized active-sensing platform with onboard GPU-accelerated compute that is capable of agile flight; a containerized ROS~2-based modular autonomy stack; and a photorealistic digital twin of the hardware platform together with a reliable UI. These elements enable rapid iteration via zero-shot transfer of containerized autonomy components between simulation and real flights. We demonstrate trajectory tracking and exploration performance using onboard sensing in industrial indoor environments. All hardware designs, simulation assets, and containerized software are released openly together with documentation.
Permutation Invariant Likelihoods and Equivariant Transformations
Feb 05, 2019
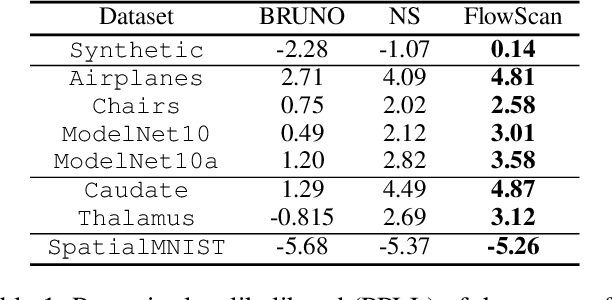


In this work, we fill a substantial void in machine learning and statistical methodology by developing extensive generative density estimation techniques for exchangeable non-iid data. We do so through the use of permutation invariant likelihoods and permutation equivariant transformations of variables. These methods exploit the intradependencies within sets in ways that are independent of ordering (for likelihoods) or order preserving (for transformations). The proposed techniques are able to directly model exchangeable data (such as sets) without the need to account for permutations or assume independence of elements. We consider applications to point clouds and provide several interesting experiments on both synthetic and real-world datasets.