 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelica
Papers and Code
Automating Modelica Module Generation Using Large Language Models: A Case Study on Building Control Description Language
Sep 18, 2025Dynamic energy systems and controls require advanced modeling frameworks to design and test supervisory and fault tolerant strategies. Modelica is a widely used equation based language, but developing control modules is labor intensive and requires specialized expertise. This paper examines the use of large language models (LLMs) to automate the generation of Control Description Language modules in the Building Modelica Library as a case study. We developed a structured workflow that combines standardized prompt scaffolds, library aware grounding, automated compilation with OpenModelica, and human in the loop evaluation. Experiments were carried out on four basic logic tasks (And, Or, Not, and Switch) and five control modules (chiller enable/disable, bypass valve control, cooling tower fan speed, plant requests, and relief damper control). The results showed that GPT 4o failed to produce executable Modelica code in zero shot mode, while Claude Sonnet 4 achieved up to full success for basic logic blocks with carefully engineered prompts. For control modules, success rates reached 83 percent, and failed outputs required medium level human repair (estimated one to eight hours). Retrieval augmented generation often produced mismatches in module selection (for example, And retrieved as Or), while a deterministic hard rule search strategy avoided these errors. Human evaluation also outperformed AI evaluation, since current LLMs cannot assess simulation results or validate behavioral correctness. Despite these limitations, the LLM assisted workflow reduced the average development time from 10 to 20 hours down to 4 to 6 hours per module, corresponding to 40 to 60 percent time savings. These results highlight both the potential and current limitations of LLM assisted Modelica generation, and point to future research in pre simulation validation, stronger grounding, and closed loop evaluation.
Hybrid data driven/thermal simulation model for comfort assessment
Sep 04, 2023



Machine learning models improve the speed and quality of physical models. However, they require a large amount of data, which is often difficult and costly to acquire. Predicting thermal comfort, for example, requires a controlled environment, with participants presenting various characteristics (age, gender, ...). This paper proposes a method for hybridizing real data with simulated data for thermal comfort prediction. The simulations are performed using Modelica Language. A benchmarking study is realized to compare different machine learning methods. Obtained results look promising with an F1 score of 0.999 obtained using the random forest model.
Reinforcement Learning for Thermostatically Controlled Loads Control using Modelica and Python
May 09, 2020



The aim of the project is to investigate and assess opportunities for applying reinforcement learning (RL) for power system control. As a proof of concept (PoC), voltage control of thermostatically controlled loads (TCLs) for power consumption regulation was developed using Modelica-based pipeline. The Q-learning RL algorithm has been validated for deterministic and stochastic initialization of TCLs. The latter modelling is closer to real grid behaviour, which challenges the control development, considering the stochastic nature of load switching. In addition, the paper shows the influence of Q-learning parameters, including discretization of state-action space, on the controller performance.
ModelicaGym: Applying Reinforcement Learning to Modelica Models
Sep 18, 2019
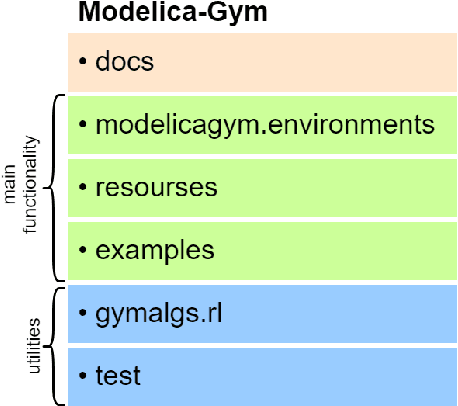


This paper presents ModelicaGym toolbox that was developed to employ Reinforcement Learning (RL) for solving optimization and control tasks in Modelica models. The developed tool allows connecting models using Functional Mock-up Interface (FMI) toOpenAI Gym toolkit in order to exploit Modelica equation-based modelling and co-simulation together with RL algorithms as a functionality of the tools correspondingly. Thus, ModelicaGym facilitates fast and convenient development of RL algorithms and their comparison when solving optimal control problem for Modelicadynamic models. Inheritance structure ofModelicaGymtoolbox's classes and the implemented methods are discussed in details. The toolbox functionality validation is performed on Cart-Pole balancing problem. This includes physical system model description and its integration using the toolbox, experiments on selection and influence of the model parameters (i.e. force magnitude, Cart-pole mass ratio, reward ratio, and simulation time step) on the learning process of Q-learning algorithm supported with the discussion of the simulation results.
Window Opening Model using Deep Learning Methods
Sep 20, 2018
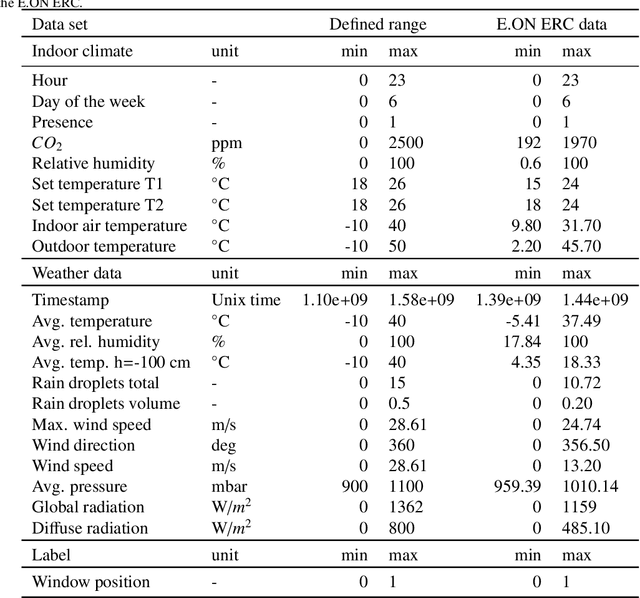
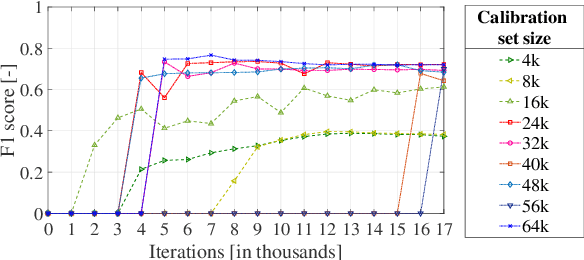
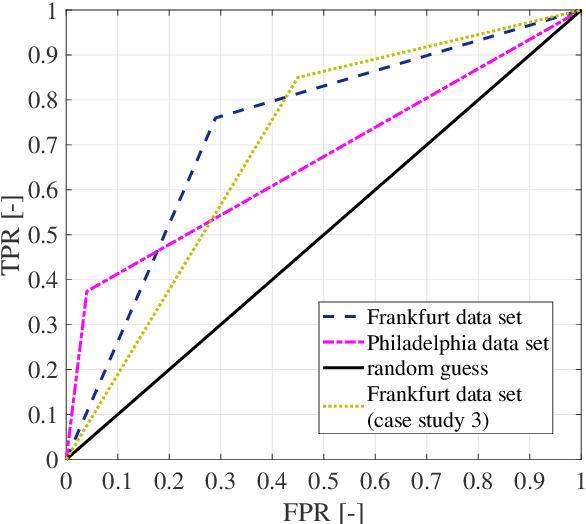
Occupant behavior (OB) and in particular window openings need to be considered in building performance simulation (BPS), in order to realistically model the indoor climate and energy consumption for heating ventilation and air conditioning (HVAC). However, the proposed OB window opening models are often biased towards the over-represented class where windows remained closed. In addition, they require tuning for each occupant which can not be efficiently scaled to the increased number of occupants. This paper presents a window opening model for commercial buildings using deep learning methods. The model is trained using data from occupants from an office building in Germany. In total the model is evaluated using almost 20 mio. data points from 3 independent buildings, located in Aachen, Frankfurt and Philadelphia. Eventually, the results of 3100 core hours of model development are summarized, which makes this study the largest of its kind in window states modeling. Additionally, the practical potential of the proposed model was tested by incorporating it in the Modelica-based thermal building simulation. The resulting evaluation accuracy and F1 scores on the office buildings ranged between 86-89 % and 0.53-0.65 respectively. The performance dropped around 15 % points in case of sparse input data, while the F1 score remained high.
Multivariate Industrial Time Series with Cyber-Attack Simulation: Fault Detection Using an LSTM-based Predictive Data Model
Dec 26, 2016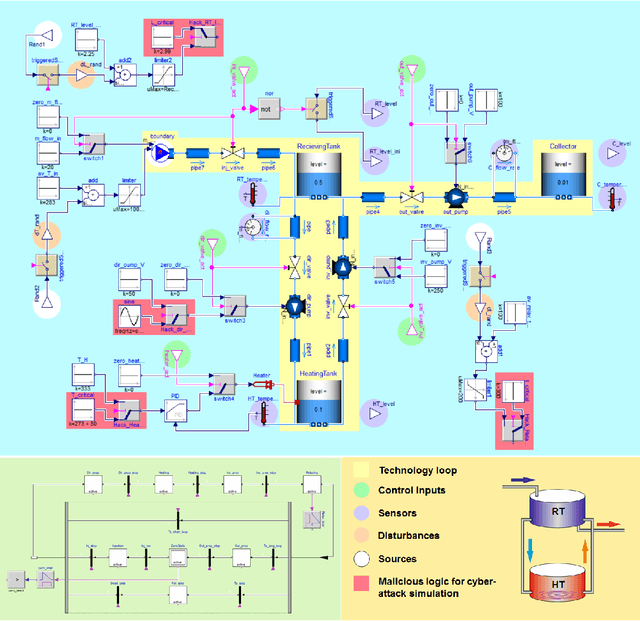
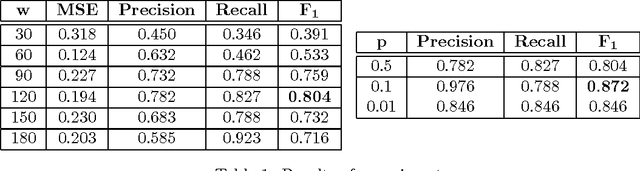
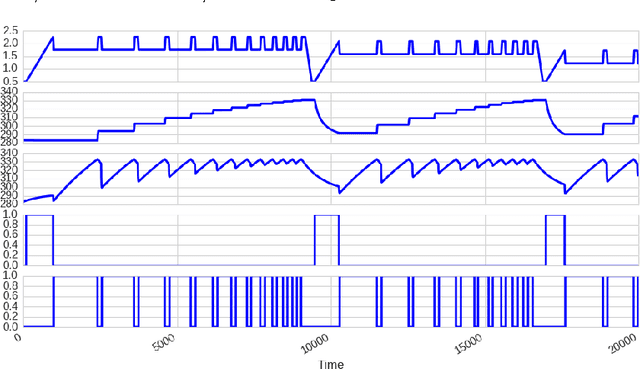

We adopted an approach based on an LSTM neural network to monitor and detect faults in industrial multivariate time series data. To validate the approach we created a Modelica model of part of a real gasoil plant. By introducing hacks into the logic of the Modelica model, we were able to generate both the roots and causes of fault behavior in the plant. Having a self-consistent data set with labeled faults, we used an LSTM architecture with a forecasting error threshold to obtain precision and recall quality metrics. The dependency of the quality metric on the threshold level is considered. An appropriate mechanism such as "one handle" was introduced for filtering faults that are outside of the plant operator field of interest.