 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Mode Decomposition as Trusted Data Augmentation in ML-based Power System Stability Assessment
Jun 13, 2024



Balanced data is required for deep neural networks (DNNs) when learning to perform power system stability assessment. However, power system measurement data contains relatively few events from where power system dynamics can be learnt. To mitigate this imbalance, we propose a novel data augmentation strategy preserving the dynamic characteristics to be learnt. The augmentation is performed using Variational Mode Decomposition. The detrended and the augmented data are tested for distributions similarity using Kernel Maximum Mean Discrepancy test. In addition, the effectiveness of the augmentation methodology is validated via training an Encoder DNN utilizing original data, testing using the augmented data, and evaluating the Encoder's performance employing several metrics.
Reinforcement Learning for Thermostatically Controlled Loads Control using Modelica and Python
May 09, 2020



The aim of the project is to investigate and assess opportunities for applying reinforcement learning (RL) for power system control. As a proof of concept (PoC), voltage control of thermostatically controlled loads (TCLs) for power consumption regulation was developed using Modelica-based pipeline. The Q-learning RL algorithm has been validated for deterministic and stochastic initialization of TCLs. The latter modelling is closer to real grid behaviour, which challenges the control development, considering the stochastic nature of load switching. In addition, the paper shows the influence of Q-learning parameters, including discretization of state-action space, on the controller performance.
ModelicaGym: Applying Reinforcement Learning to Modelica Models
Sep 18, 2019
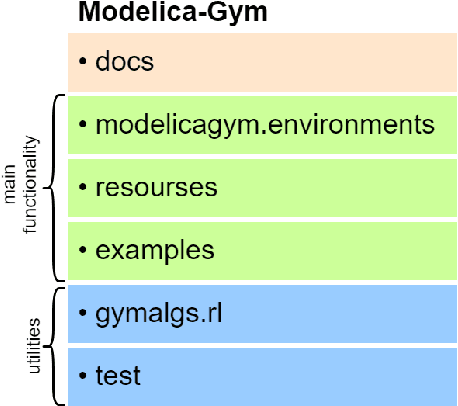


This paper presents ModelicaGym toolbox that was developed to employ Reinforcement Learning (RL) for solving optimization and control tasks in Modelica models. The developed tool allows connecting models using Functional Mock-up Interface (FMI) toOpenAI Gym toolkit in order to exploit Modelica equation-based modelling and co-simulation together with RL algorithms as a functionality of the tools correspondingly. Thus, ModelicaGym facilitates fast and convenient development of RL algorithms and their comparison when solving optimal control problem for Modelicadynamic models. Inheritance structure ofModelicaGymtoolbox's classes and the implemented methods are discussed in details. The toolbox functionality validation is performed on Cart-Pole balancing problem. This includes physical system model description and its integration using the toolbox, experiments on selection and influence of the model parameters (i.e. force magnitude, Cart-pole mass ratio, reward ratio, and simulation time step) on the learning process of Q-learning algorithm supported with the discussion of the simulation results.