 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiwi Kinect Head Pose
Papers and Code
Face-from-Depth for Head Pose Estimation on Depth Images
Aug 30, 2018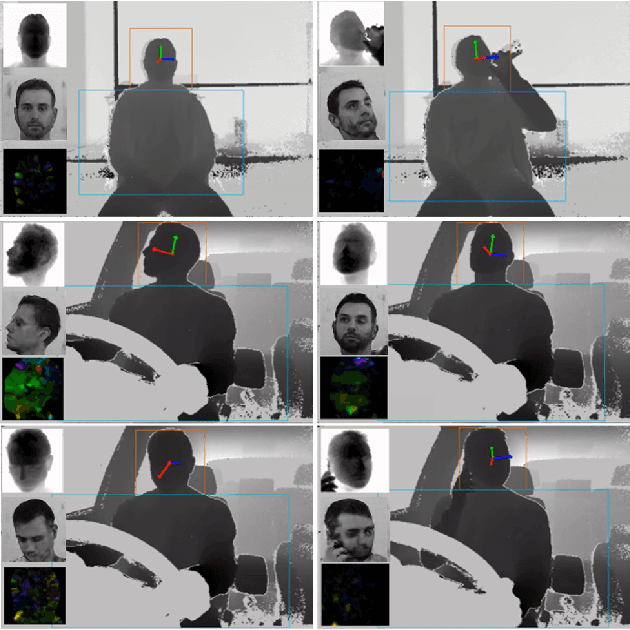
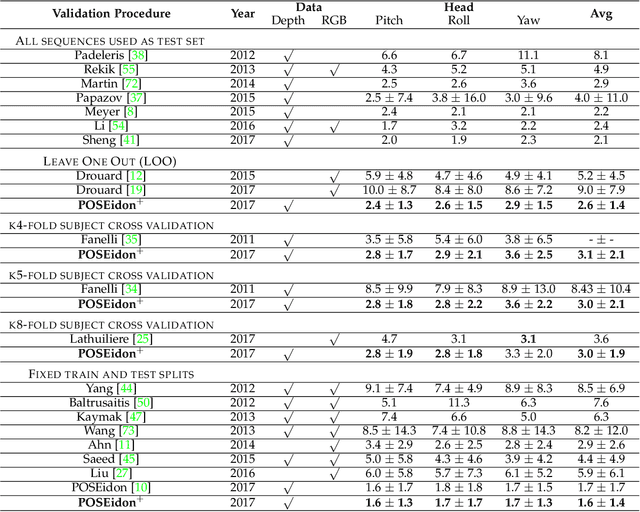

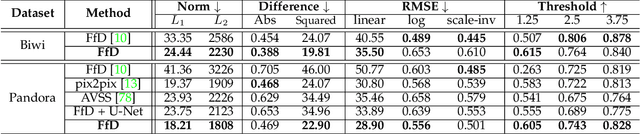
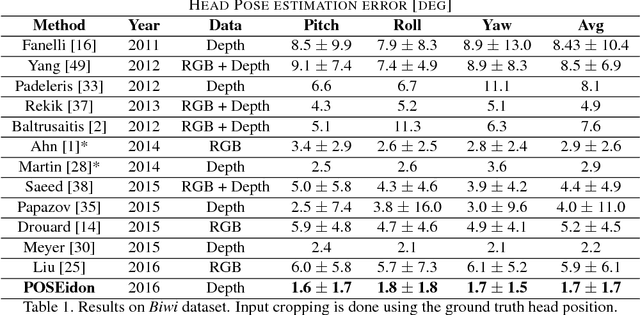
Depth cameras allow to set up reliable solutions for people monitoring and behavior understanding, especially when unstable or poor illumination conditions make unusable common RGB sensors. Therefore, we propose a complete framework for the estimation of the head and shoulder pose based on depth images only. A head detection and localization module is also included, in order to develop a complete end-to-end system. The core element of the framework is a Convolutional Neural Network, called POSEidon+, that receives as input three types of images and provides the 3D angles of the pose as output. Moreover, a Face-from-Depth component based on a Deterministic Conditional GAN model is able to hallucinate a face from the corresponding depth image. We empirically demonstrate that this positively impacts the system performances. We test the proposed framework on two public datasets, namely Biwi Kinect Head Pose and ICT-3DHP, and on Pandora, a new challenging dataset mainly inspired by the automotive setup. Experimental results show that our method overcomes several recent state-of-art works based on both intensity and depth input data, running in real-time at more than 30 frames per second.
A Single Image based Head Pose Estimation Method with Spherical Parameterization
Jul 24, 2019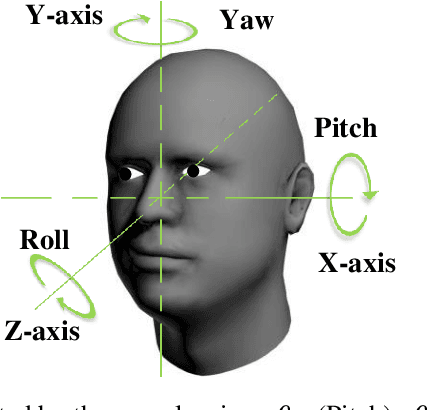
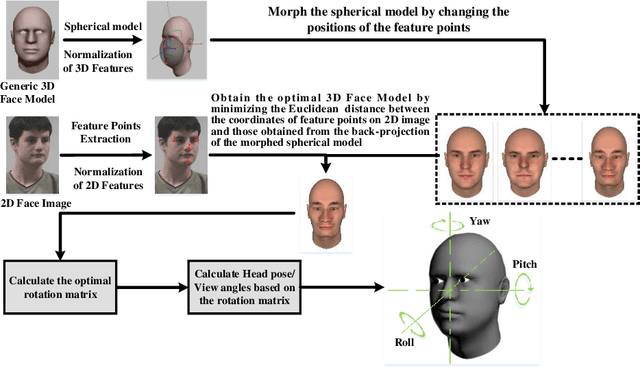
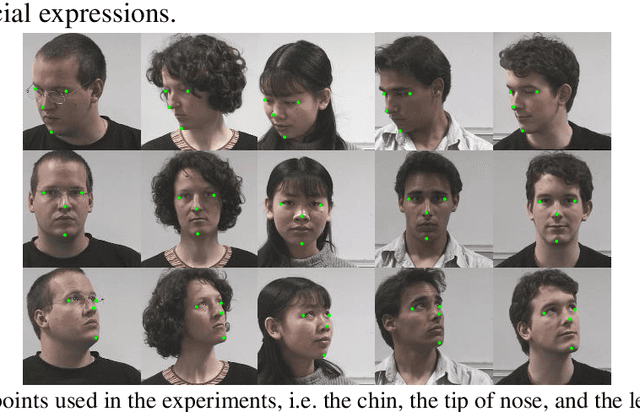
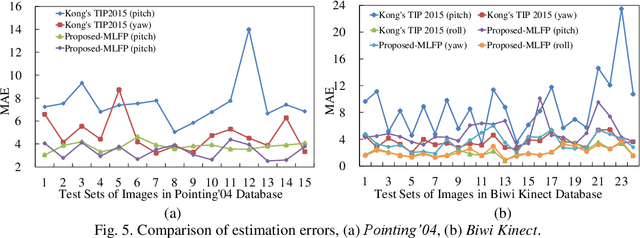
Head pose estimation plays a vital role in various applications, e.g., driverassistance systems, human-computer interaction, virtual reality technology, and so on. We propose a novel geometry based algorithm for accurately estimating the head pose from a single 2D face image at a very low computational cost. Specifically, the rectangular coordinates of only four non-coplanar feature points from a predefined 3D facial model as well as the corresponding ones automatically/ manually extracted from a 2D face image are first normalized to exclude the effect of external factors (i.e., scale factor and translation parameters). Then, the four normalized 3D feature points are represented in spherical coordinates with reference to the uniquely determined sphere by themselves. Due to the spherical parameterization, the coordinates of feature points can then be morphed along all the three directions in the rectangular coordinates effectively. Finally, the rotation matrix indicating the head pose is obtained by minimizing the Euclidean distance between the normalized 2D feature points and the 2D re-projections of morphed 3D feature points. Comprehensive experimental results over two popular databases, i.e., Pointing'04 and Biwi Kinect, demonstrate that the proposed algorithm can estimate head poses with higher accuracy and lower run time than state-of-the-art geometry based methods. Even compared with start-of-the-art learning based methods or geometry based methods with additional depth information, our algorithm still produces comparable performance.
POSEidon: Face-from-Depth for Driver Pose Estimation
Dec 12, 2017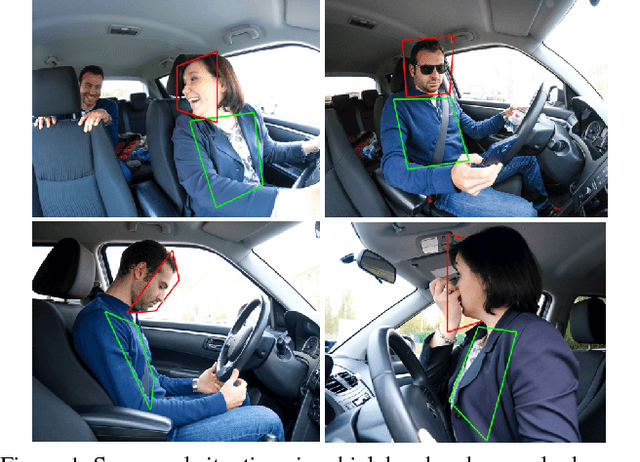
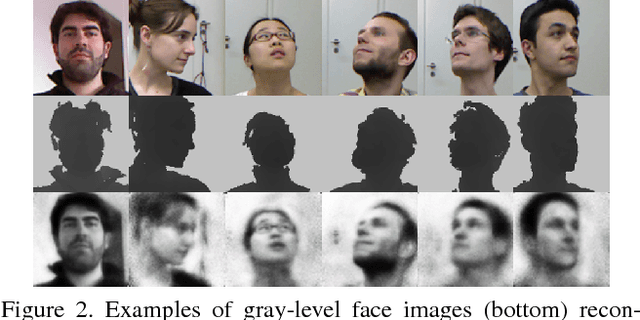
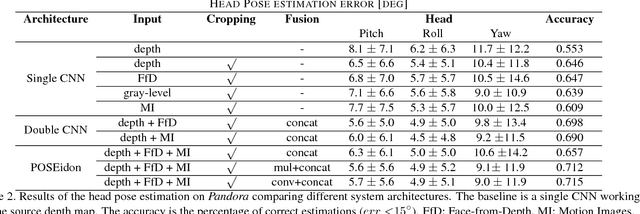
Fast and accurate upper-body and head pose estimation is a key task for automatic monitoring of driver attention, a challenging context characterized by severe illumination changes, occlusions and extreme poses. In this work, we present a new deep learning framework for head localization and pose estimation on depth images. The core of the proposal is a regression neural network, called POSEidon, which is composed of three independent convolutional nets followed by a fusion layer, specially conceived for understanding the pose by depth. In addition, to recover the intrinsic value of face appearance for understanding head position and orientation, we propose a new Face-from-Depth approach for learning image faces from depth. Results in face reconstruction are qualitatively impressive. We test the proposed framework on two public datasets, namely Biwi Kinect Head Pose and ICT-3DHP, and on Pandora, a new challenging dataset mainly inspired by the automotive setup. Results show that our method overcomes all recent state-of-art works, running in real time at more than 30 frames per second.
Deep Head Pose Estimation from Depth Data for In-car Automotive Applications
Mar 06, 2017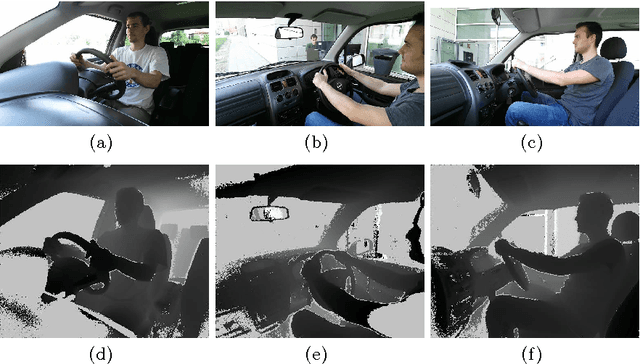
Recently, deep learning approaches have achieved promising results in various fields of computer vision. In this paper, we tackle the problem of head pose estimation through a Convolutional Neural Network (CNN). Differently from other proposals in the literature, the described system is able to work directly and based only on raw depth data. Moreover, the head pose estimation is solved as a regression problem and does not rely on visual facial features like facial landmarks. We tested our system on a well known public dataset, Biwi Kinect Head Pose, showing that our approach achieves state-of-art results and is able to meet real time performance requirements.
From Depth Data to Head Pose Estimation: a Siamese approach
Mar 10, 2017
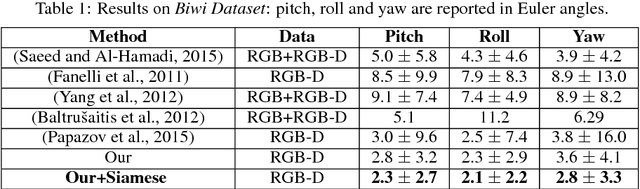
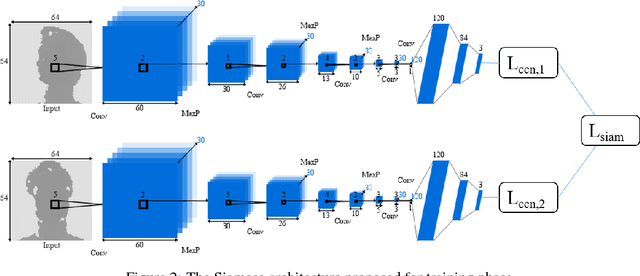
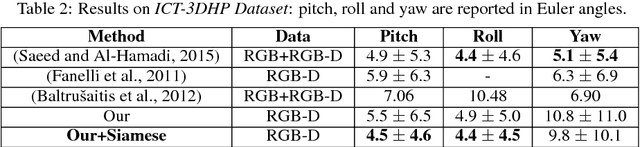
The correct estimation of the head pose is a problem of the great importance for many applications. For instance, it is an enabling technology in automotive for driver attention monitoring. In this paper, we tackle the pose estimation problem through a deep learning network working in regression manner. Traditional methods usually rely on visual facial features, such as facial landmarks or nose tip position. In contrast, we exploit a Convolutional Neural Network (CNN) to perform head pose estimation directly from depth data. We exploit a Siamese architecture and we propose a novel loss function to improve the learning of the regression network layer. The system has been tested on two public datasets, Biwi Kinect Head Pose and ICT-3DHP database. The reported results demonstrate the improvement in accuracy with respect to current state-of-the-art approaches and the real time capabilities of the overall framework.