 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRiEMann: Near Real-Time SE(3)-Equivariant Robot Manipulation without Point Cloud Segmentation
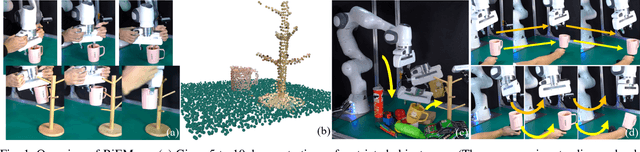
We present RiEMann, an end-to-end near Real-time SE(3)-Equivariant Robot Manipulation imitation learning framework from scene point cloud input. Compared to previous methods that rely on descriptor field matching, RiEMann directly predicts the target poses of objects for manipulation without any object segmentation. RiEMann learns a manipulation task from scratch with 5 to 10 demonstrations, generalizes to unseen SE(3) transformations and instances of target objects, resists visual interference of distracting objects, and follows the near real-time pose change of the target object. The scalable action space of RiEMann facilitates the addition of custom equivariant actions such as the direction of turning the faucet, which makes articulated object manipulation possible for RiEMann. In simulation and real-world 6-DOF robot manipulation experiments, we test RiEMann on 5 categories of manipulation tasks with a total of 25 variants and show that RiEMann outperforms baselines in both task success rates and SE(3) geodesic distance errors on predicted poses (reduced by 68.6%), and achieves a 5.4 frames per second (FPS) network inference speed. Code and video results are available at https://riemann-web.github.io/.