Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIDGARD: A Simulation Platform for Autonomous Navigation in Unstructured Environments
Paper and Code
May 17, 2022
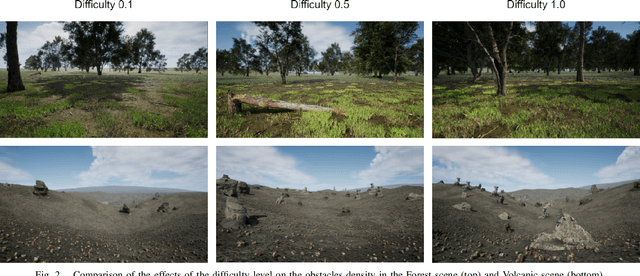
We present MIDGARD, an open source simulation platform for autonomous robot navigation in unstructured outdoor environments. We specifically design MIDGARD to enable training of autonomous agents (e.g., unmanned ground vehicles) in photorealistic 3D environments, and to support the generalization skills of learning-based agents by means of diverse and variable training scenarios. MIDGARD differs from other major simulation platforms in that it proposes a highly configurable procedural landscape generation pipeline, which enables autonomous agents to be trained in diverse scenarios while reducing the efforts and costs needed to create digital content from scratch.
View paper on