Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Quadrupedal Legged and Aerial Locomotion via Structure Repurposing
Paper and Code
Oct 10, 2025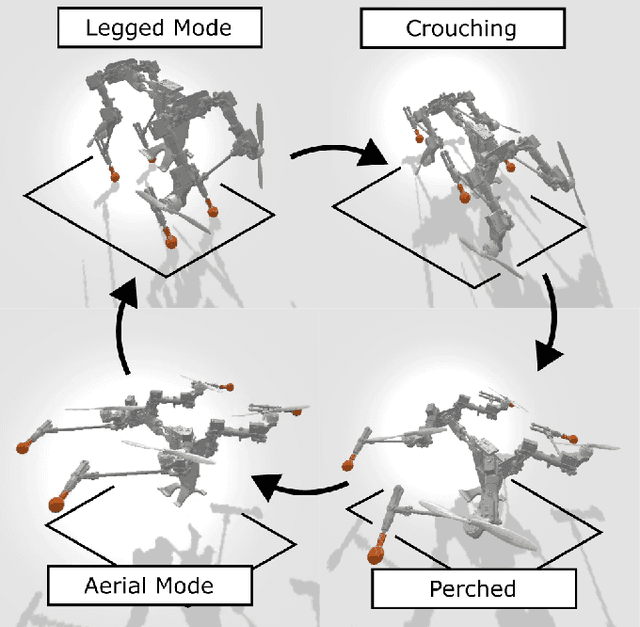
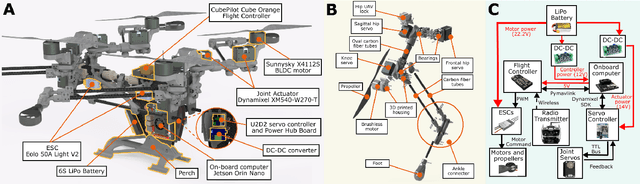
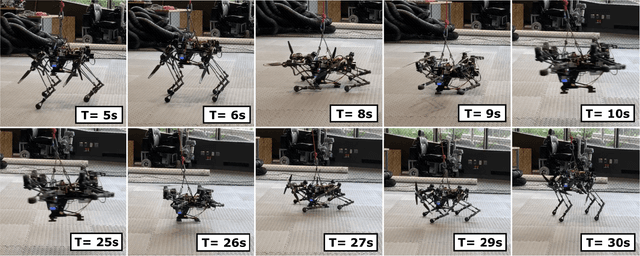
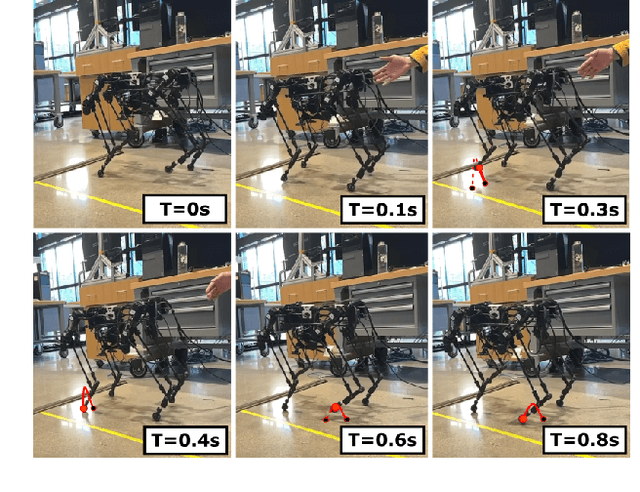
Multi-modal ground-aerial robots have been extensively studied, with a significant challenge lying in the integration of conflicting requirements across different modes of operation. The Husky robot family, developed at Northeastern University, and specifically the Husky v.2 discussed in this study, addresses this challenge by incorporating posture manipulation and thrust vectoring into multi-modal locomotion through structure repurposing. This quadrupedal robot features leg structures that can be repurposed for dynamic legged locomotion and flight. In this paper, we present the hardware design of the robot and report primary results on dynamic quadrupedal legged locomotion and hovering.
View paper on