 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera-Lidar Integration: Probabilistic sensor fusion for semantic mapping
Paper and Code
Jul 09, 2020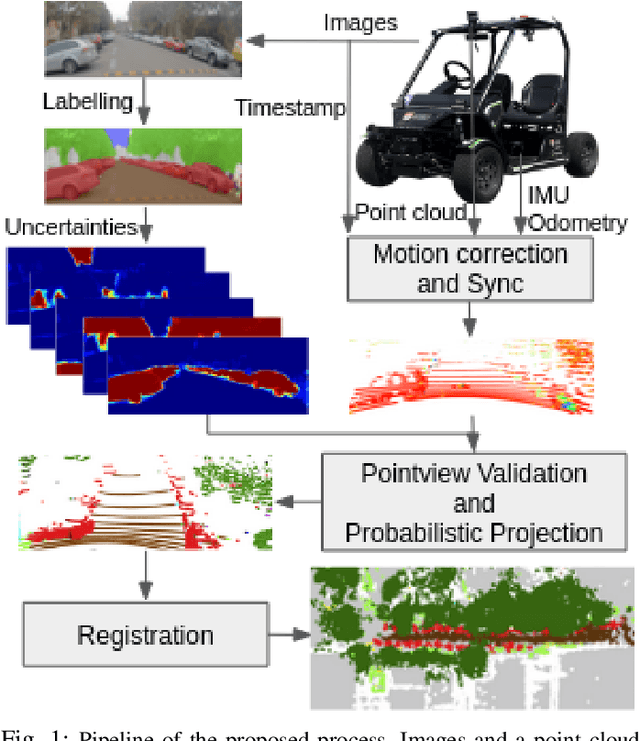
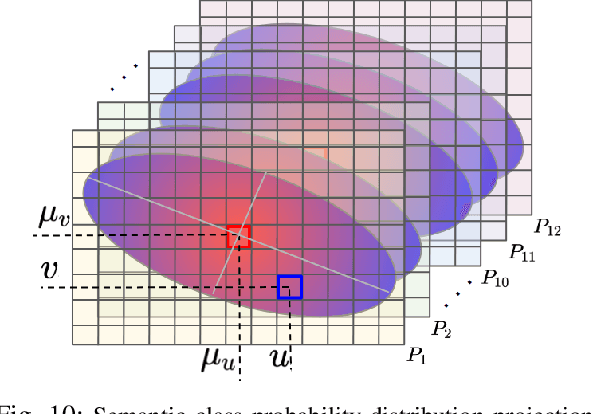
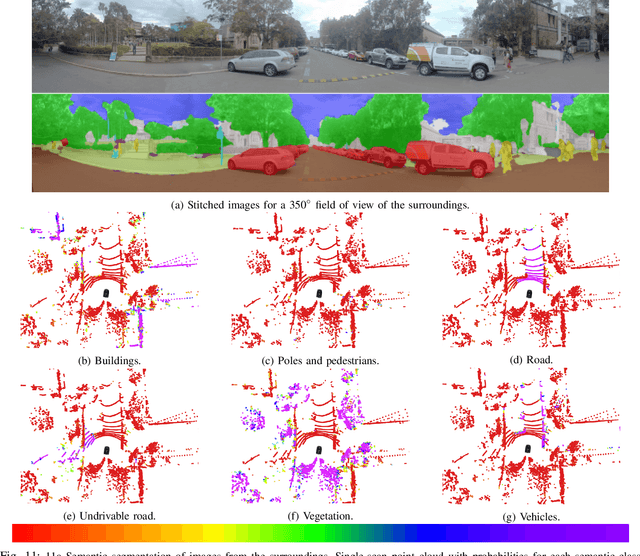
An automated vehicle operating in an urban environment must be able to perceive and recognise object/obstacles in a three-dimensional world while navigating in a constantly changing environment. In order to plan and execute accurate sophisticated driving maneuvers, a high-level contextual understanding of the surroundings is essential. Due to the recent progress in image processing, it is now possible to obtain high definition semantic information in 2D from monocular cameras, though cameras cannot reliably provide the highly accurate 3D information provided by lasers. The fusion of these two sensor modalities can overcome the shortcomings of each individual sensor, though there are a number of important challenges that need to be addressed in a probabilistic manner. In this paper, we address the common, yet challenging, lidar/camera/semantic fusion problems which are seldom approached in a wholly probabilistic manner. Our approach is capable of using a multi-sensor platform to build a three-dimensional semantic voxelized map that considers the uncertainty of all of the processes involved. We present a probabilistic pipeline that incorporates uncertainties from the sensor readings (cameras, lidar, IMU and wheel encoders), compensation for the motion of the vehicle, and heuristic label probabilities for the semantic images. We also present a novel and efficient viewpoint validation algorithm to check for occlusions from the camera frames. A probabilistic projection is performed from the camera images to the lidar point cloud. Each labelled lidar scan then feeds into an octree map building algorithm that updates the class probabilities of the map voxels every time a new observation is available. We validate our approach using a set of qualitative and quantitative experimental tests on the USyd Dataset.