 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Decision and Control for High-Level Automated Vehicles by Mixed Policy Gradient and Its Experiment Verification
Paper and Code
Oct 19, 2022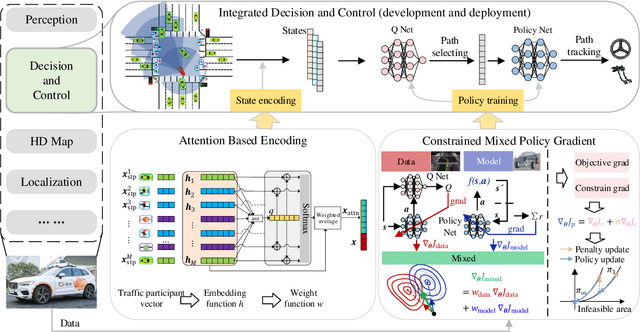
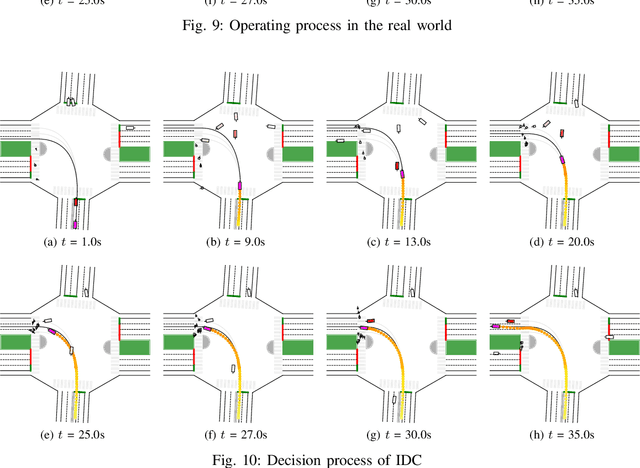
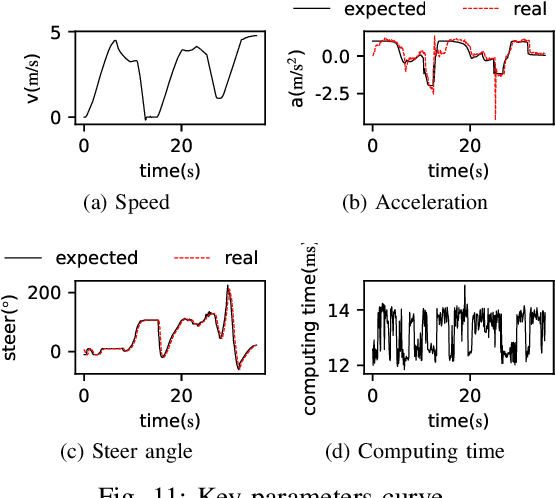
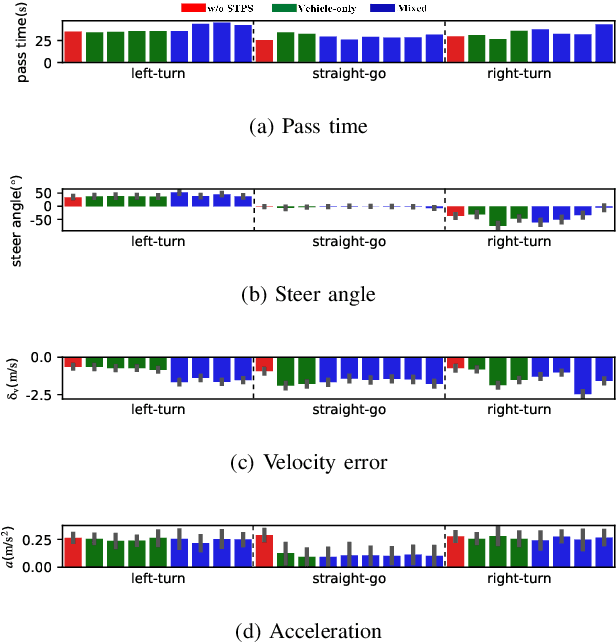
Self-evolution is indispensable to realize full autonomous driving. This paper presents a self-evolving decision-making system based on the Integrated Decision and Control (IDC), an advanced framework built on reinforcement learning (RL). First, an RL algorithm called constrained mixed policy gradient (CMPG) is proposed to consistently upgrade the driving policy of the IDC. It adapts the MPG under the penalty method so that it can solve constrained optimization problems using both the data and model. Second, an attention-based encoding (ABE) method is designed to tackle the state representation issue. It introduces an embedding network for feature extraction and a weighting network for feature fusion, fulfilling order-insensitive encoding and importance distinguishing of road users. Finally, by fusing CMPG and ABE, we develop the first data-driven decision and control system under the IDC architecture, and deploy the system on a fully-functional self-driving vehicle running in daily operation. Experiment results show that boosting by data, the system can achieve better driving ability over model-based methods. It also demonstrates safe, efficient and smart driving behavior in various complex scenes at a signalized intersection with real mixed traffic flow.