 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVersatile Real-Time Motion Synthesis via Kino-Dynamic MPC with Hybrid-Systems DDP
Paper and Code
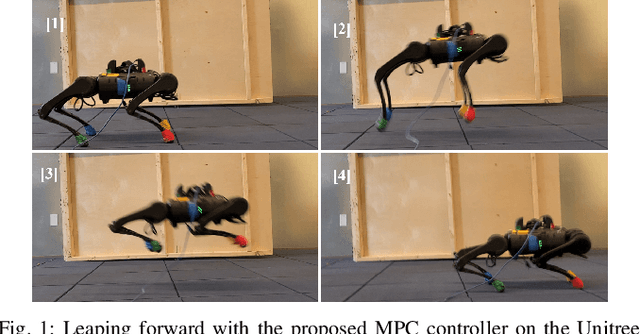
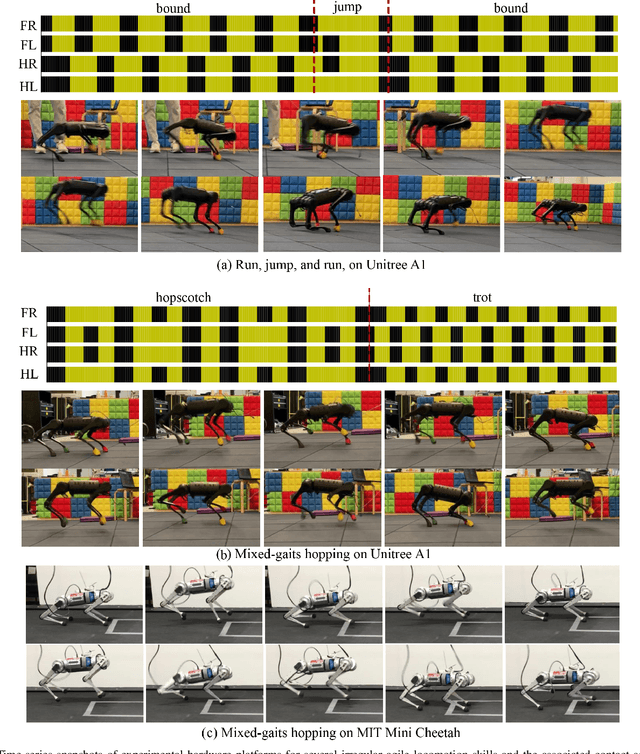
Specialized motions such as jumping are often achieved on quadruped robots by solving a trajectory optimization problem once and executing the trajectory using a tracking controller. This approach is in parallel with Model Predictive Control (MPC) strategies that commonly control regular gaits via online re-planning. In this work, we present a nonlinear MPC (NMPC) technique that unlocks on-the-fly re-planning of specialized motion skills and regular locomotion within a unified framework. The NMPC reasons about a hybrid kinodynamic model, and is solved using a variant of a constrained Differential Dynamic Programming (DDP) solver. The proposed NMPC enables the robot to perform a variety of agile skills like jumping, bounding, and trotting, and the rapid transition between these skills. We evaluated the proposed algorithm with three challenging motion sequences that combine multiple agile skills, on two quadruped platforms, Unitree A1, and MIT Mini Cheetah, showing its effectiveness and generality.