 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Generalized Continuous Collision Detection Framework of Polynomial Trajectory for Mobile Robots in Cluttered Environments
Paper and Code
Jun 27, 2022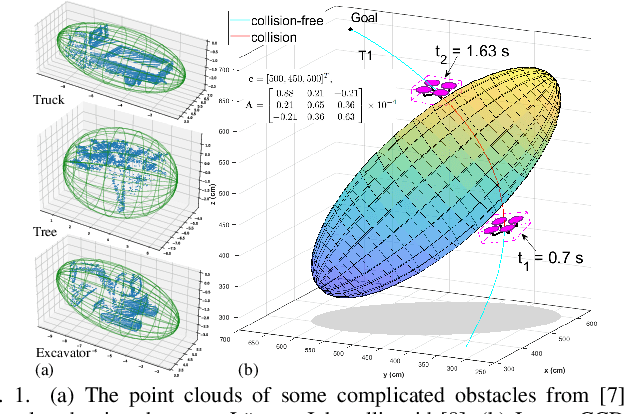
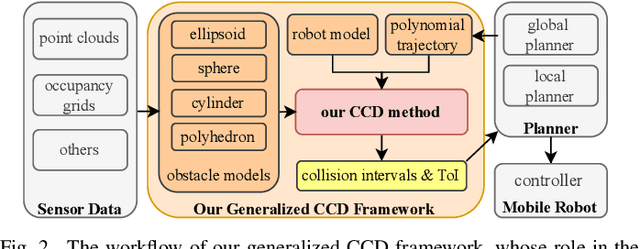
In this paper, we introduce a generalized continuous collision detection (CCD) framework for the mobile robot along the polynomial trajectory in cluttered environments including various static obstacle models. Specifically, we find that the collision conditions between robots and obstacles could be transformed into a set of polynomial inequalities, whose roots can be efficiently solved by the proposed solver. In addition, we test different types of mobile robots with various kinematic and dynamic constraints in our generalized CCD framework and validate that it allows the provable collision checking and can compute the exact time of impact. Furthermore, we combine our architecture with the path planner in the navigation system. Benefiting from our CCD method, the mobile robot is able to work safely in some challenging scenarios.