 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUni6D: A Unified CNN Framework without Projection Breakdown for 6D Pose Estimation
Paper and Code
Apr 05, 2022
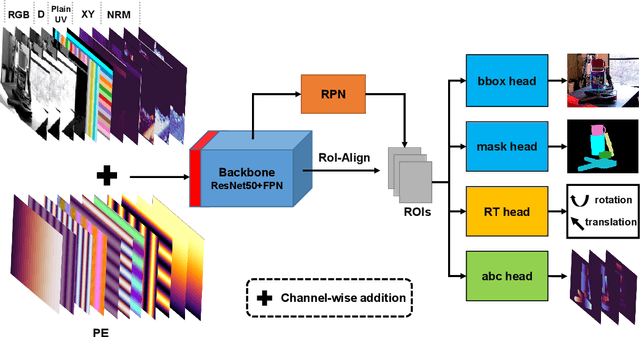
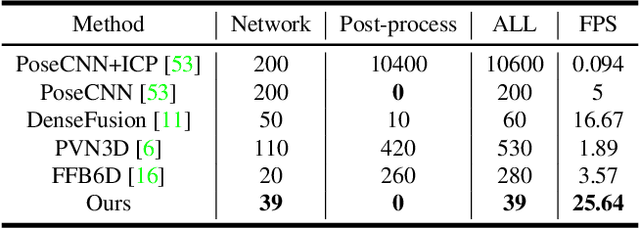
As RGB-D sensors become more affordable, using RGB-D images to obtain high-accuracy 6D pose estimation results becomes a better option. State-of-the-art approaches typically use different backbones to extract features for RGB and depth images. They use a 2D CNN for RGB images and a per-pixel point cloud network for depth data, as well as a fusion network for feature fusion. We find that the essential reason for using two independent backbones is the "projection breakdown" problem. In the depth image plane, the projected 3D structure of the physical world is preserved by the 1D depth value and its built-in 2D pixel coordinate (UV). Any spatial transformation that modifies UV, such as resize, flip, crop, or pooling operations in the CNN pipeline, breaks the binding between the pixel value and UV coordinate. As a consequence, the 3D structure is no longer preserved by a modified depth image or feature. To address this issue, we propose a simple yet effective method denoted as Uni6D that explicitly takes the extra UV data along with RGB-D images as input. Our method has a Unified CNN framework for 6D pose estimation with a single CNN backbone. In particular, the architecture of our method is based on Mask R-CNN with two extra heads, one named RT head for directly predicting 6D pose and the other named abc head for guiding the network to map the visible points to their coordinates in the 3D model as an auxiliary module. This end-to-end approach balances simplicity and accuracy, achieving comparable accuracy with state of the arts and 7.2x faster inference speed on the YCB-Video dataset.