 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAMEOPT: Optimal Real-time Multi-Agent Planning and Control for Dynamic Intersections
Paper and Code
Mar 18, 2022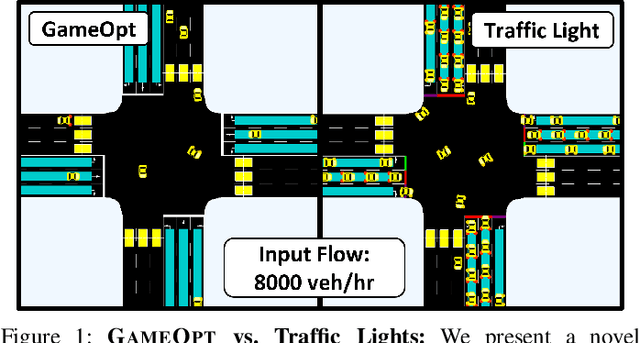
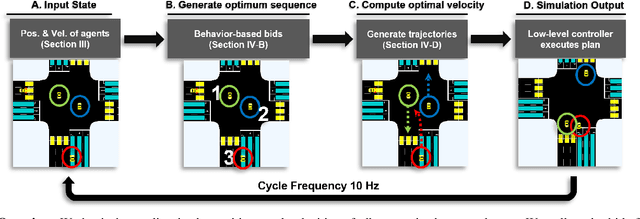
We propose GameOpt: a novel hybrid approach to cooperative intersection control for dynamic, multi-lane, unsignalized intersections. Safely navigating these complex and accident prone intersections requires simultaneous trajectory planning and negotiation among drivers. GameOpt is a hybrid formulation that first uses an auction mechanism to generate a priority entrance sequence for every agent, followed by an optimization-based trajectory planner that computes velocity controls that satisfy the priority sequence. This coupling operates at real-time speeds of less than 10 milliseconds in high density traffic of more than 10,000 vehicles/hr, 100 times faster than other fully optimization-based methods, while providing guarantees in terms of fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, time taken to reach the goal by 75%, and fuel consumption by 33% compared to auction-based approaches and signaled approaches using traffic-lights and stop signs.