 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate calibration of multi-perspective cameras from a generalization of the hand-eye constraint
Paper and Code
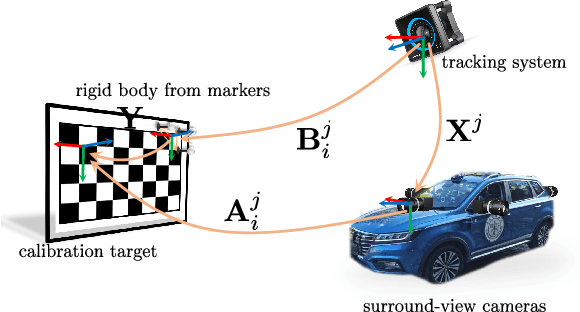
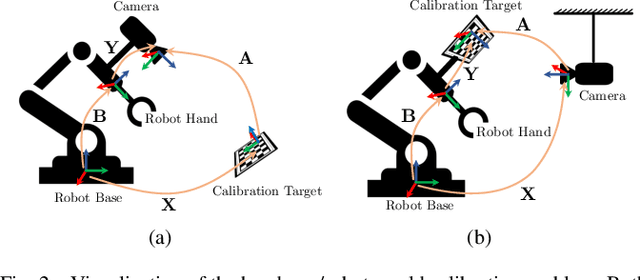
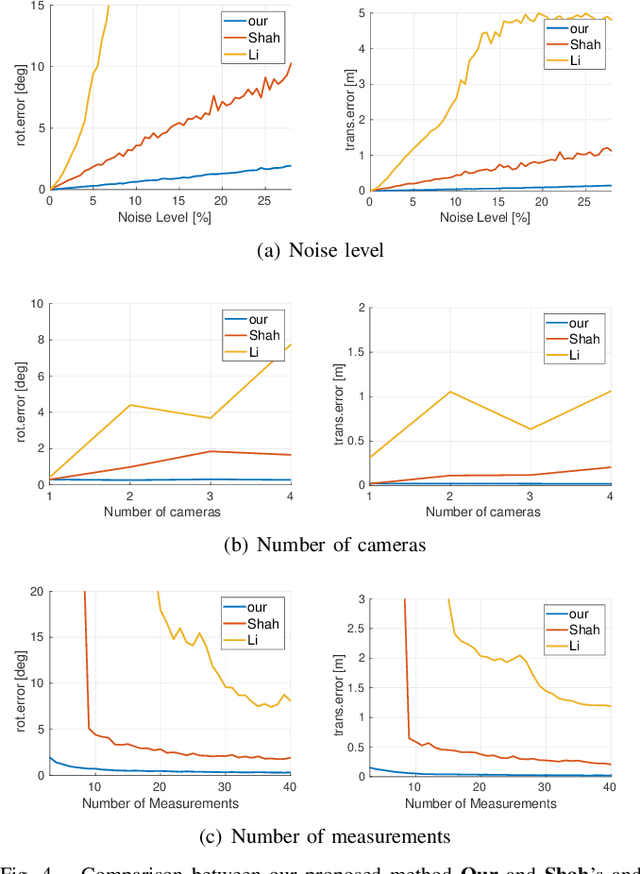
Multi-perspective cameras are quickly gaining importance in many applications such as smart vehicles and virtual or augmented reality. However, a large system size or absence of overlap in neighbouring fields-of-view often complicate their calibration. We present a novel solution which relies on the availability of an external motion capture system. Our core contribution consists of an extension to the hand-eye calibration problem which jointly solves multi-eye-to-base problems in closed form. We furthermore demonstrate its equivalence to the multi-eye-in-hand problem. The practical validity of our approach is supported by our experiments, indicating that the method is highly efficient and accurate, and outperforms existing closed-form alternatives.