 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirDet: Few-Shot Detection without Fine-tuning for Autonomous Exploration
Paper and Code
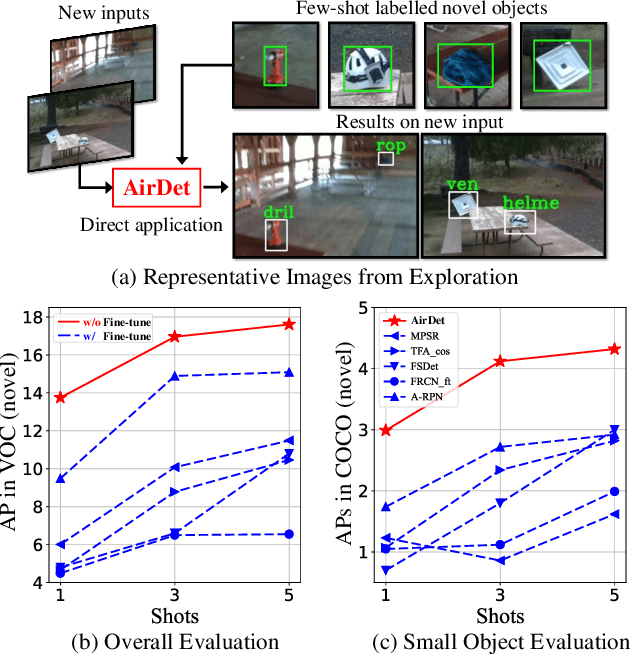
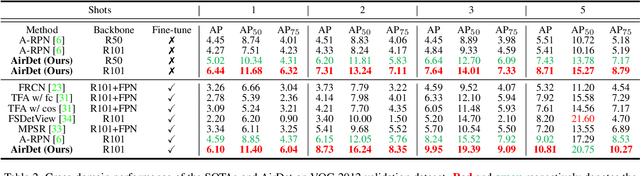
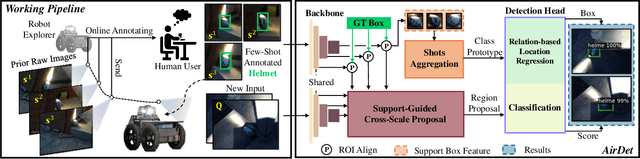
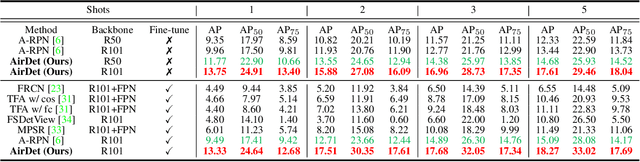
Few-shot object detection has rapidly progressed owing to the success of meta-learning strategies. However, the requirement of a fine-tuning stage in existing methods is timeconsuming and significantly hinders their usage in real-time applications such as autonomous exploration of low-power robots. To solve this problem, we present a brand new architecture, AirDet, which is free of fine-tuning by learning class agnostic relation with support images. Specifically, we propose a support-guided cross-scale (SCS) feature fusion network to generate object proposals, a global-local relation network (GLR) for shots aggregation, and a relation-based prototype embedding network (R-PEN) for precise localization. Exhaustive experiments are conducted on COCO and PASCAL VOC datasets, where surprisingly, AirDet achieves comparable or even better results than the exhaustively finetuned methods, reaching up to 40-60% improvements on the baseline. To our excitement, AirDet obtains favorable performance on multi-scale objects, especially the small ones. Furthermore, we present evaluation results on real-world exploration tests from the DARPA Subterranean Challenge, which strongly validate the feasibility of AirDet in robotics. The source code, pre-trained models, along with the real world data for exploration, will be made public.