 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Efficient Multi-Agent Cooperative Visual Exploration
Paper and Code
Oct 12, 2021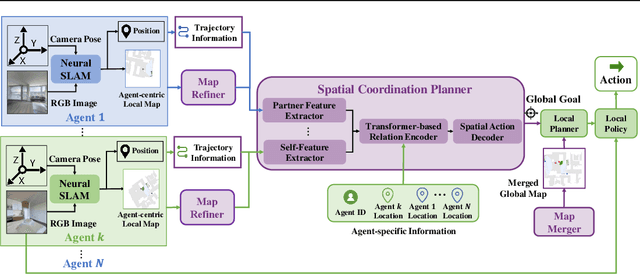
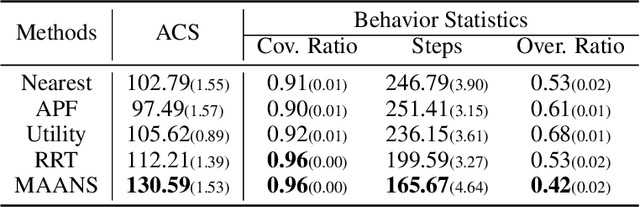
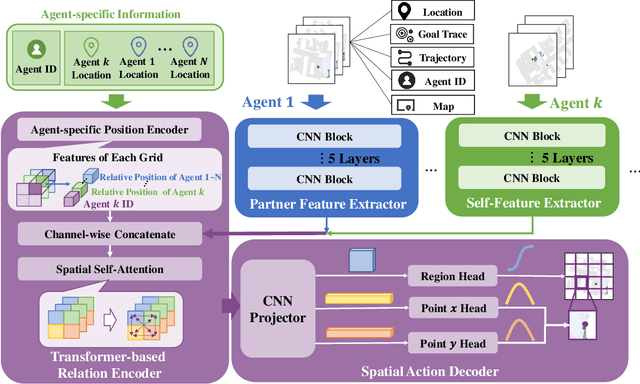
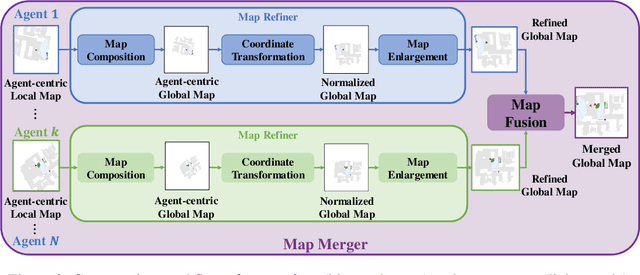
We consider the task of visual indoor exploration with multiple agents, where the agents need to cooperatively explore the entire indoor region using as few steps as possible. Classical planning-based methods often suffer from particularly expensive computation at each inference step and a limited expressiveness of cooperation strategy. By contrast, reinforcement learning (RL) has become a trending paradigm for tackling this challenge due to its modeling capability of arbitrarily complex strategies and minimal inference overhead. We extend the state-of-the-art single-agent RL solution, Active Neural SLAM (ANS), to the multi-agent setting by introducing a novel RL-based global-goal planner, Spatial Coordination Planner (SCP), which leverages spatial information from each individual agent in an end-to-end manner and effectively guides the agents to navigate towards different spatial goals with high exploration efficiency. SCP consists of a transformer-based relation encoder to capture intra-agent interactions and a spatial action decoder to produce accurate goals. In addition, we also implement a few multi-agent enhancements to process local information from each agent for an aligned spatial representation and more precise planning. Our final solution, Multi-Agent Active Neural SLAM (MAANS), combines all these techniques and substantially outperforms 4 different planning-based methods and various RL baselines in the photo-realistic physical testbed, Habitat.