 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnytime Game-Theoretic Planning with Active Reasoning About Humans' Latent States for Human-Centered Robots
Paper and Code
Sep 26, 2021
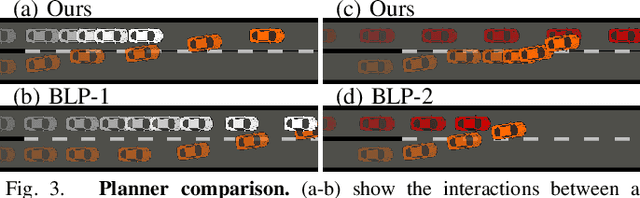

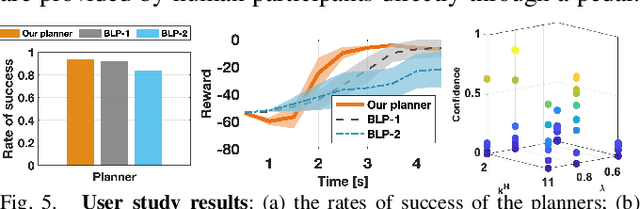
A human-centered robot needs to reason about the cognitive limitation and potential irrationality of its human partner to achieve seamless interactions. This paper proposes an anytime game-theoretic planner that integrates iterative reasoning models, a partially observable Markov decision process, and chance-constrained Monte-Carlo belief tree search for robot behavioral planning. Our planner enables a robot to safely and actively reason about its human partner's latent cognitive states (bounded intelligence and irrationality) in real-time to maximize its utility better. We validate our approach in an autonomous driving domain where our behavioral planner and a low-level motion controller hierarchically control an autonomous car to negotiate traffic merges. Simulations and user studies are conducted to show our planner's effectiveness.