 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCarl-Lead: Lidar-based End-to-End Autonomous Driving with Contrastive Deep Reinforcement Learning
Paper and Code
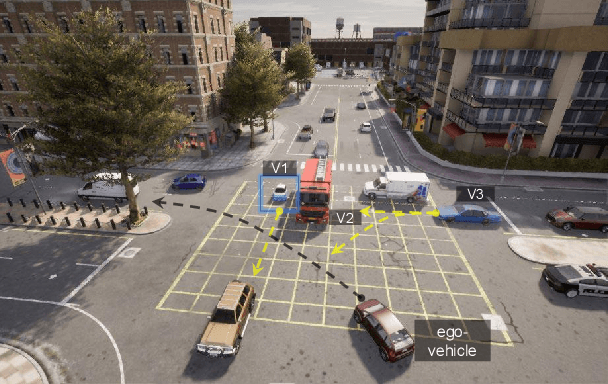
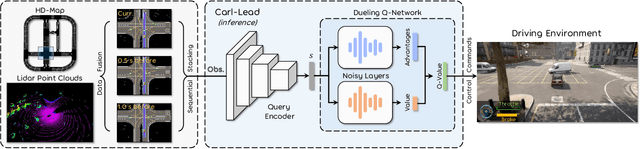
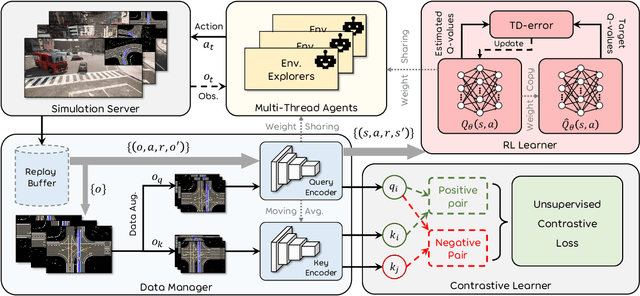
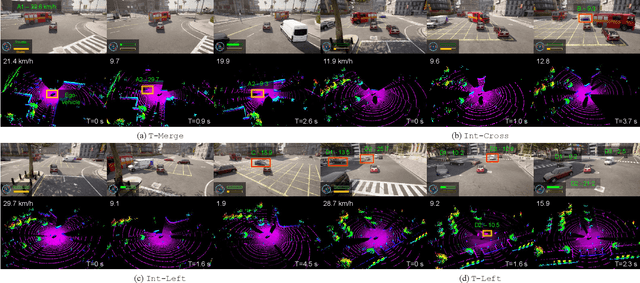
Autonomous driving in urban crowds at unregulated intersections is challenging, where dynamic occlusions and uncertain behaviors of other vehicles should be carefully considered. Traditional methods are heuristic and based on hand-engineered rules and parameters, but scale poorly in new situations. Therefore, they require high labor cost to design and maintain rules in all foreseeable scenarios. Recently, deep reinforcement learning (DRL) has shown promising results in urban driving scenarios. However, DRL is known to be sample inefficient, and most previous works assume perfect observations such as ground-truth locations and motions of vehicles without considering noises and occlusions, which might be a too strong assumption for policy deployment. In this work, we use DRL to train lidar-based end-to-end driving policies that naturally consider imperfect partial observations. We further use unsupervised contrastive representation learning as an auxiliary task to improve the sample efficiency. The comparative evaluation results reveal that our method achieves higher success rates than the state-of-the-art (SOTA) lidar-based end-to-end driving network, better trades off safety and efficiency than the carefully tuned rule-based method, and generalizes better to new scenarios than the baselines. Demo videos are available at https://caipeide.github.io/carl-lead/.