 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Stochastic Fault-tolerant Control using Precision Learning and Active Inference
Paper and Code
Sep 13, 2021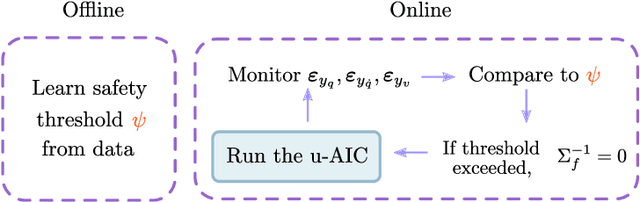
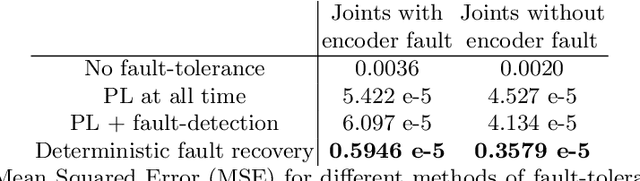
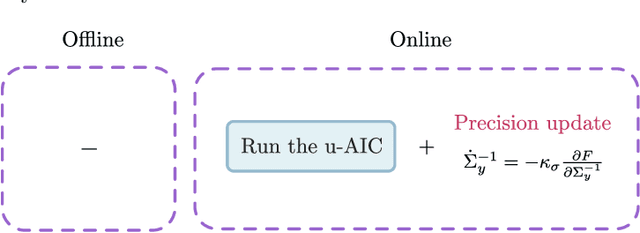
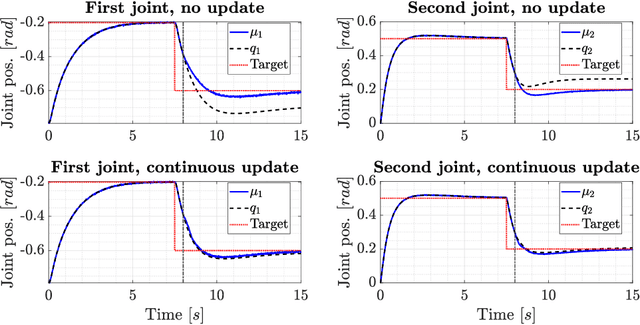
This work presents a fault-tolerant control scheme for sensory faults in robotic manipulators based on active inference. In the majority of existing schemes, a binary decision of whether a sensor is healthy (functional) or faulty is made based on measured data. The decision boundary is called a threshold and it is usually deterministic. Following a faulty decision, fault recovery is obtained by excluding the malfunctioning sensor. We propose a stochastic fault-tolerant scheme based on active inference and precision learning which does not require a priori threshold definitions to trigger fault recovery. Instead, the sensor precision, which represents its health status, is learned online in a model-free way allowing the system to gradually, and not abruptly exclude a failing unit. Experiments on a robotic manipulator show promising results and directions for future work are discussed.