 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Simultaneous Magnetic Actuation and Localization for WCE in a Tubular Environment
Paper and Code
Aug 25, 2021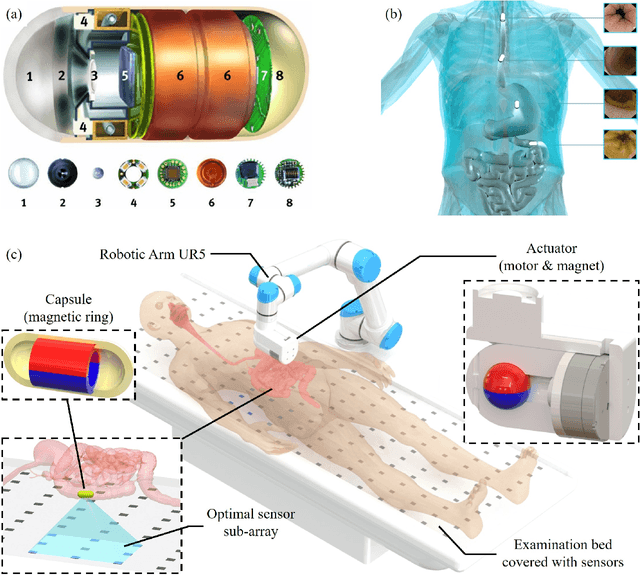
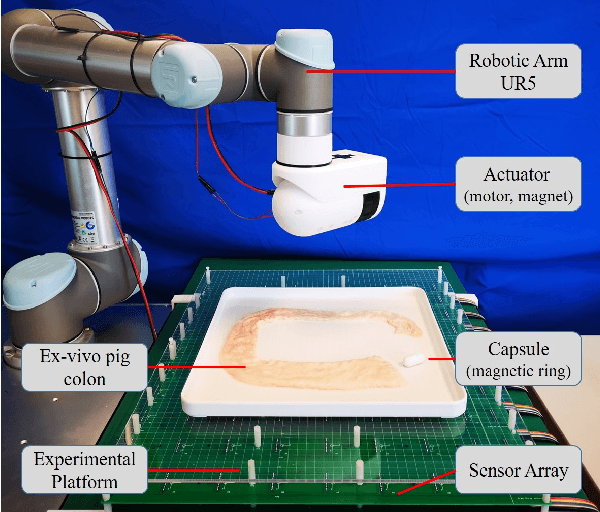
Simultaneous Magnetic Actuation and Localization (SMAL) is a promising technology for active wireless capsule endoscopy (WCE). In this paper, an adaptive SMAL system is presented to efficiently propel and precisely locate a capsule in a tubular environment with complex shapes. In order to track the capsule with high localization accuracy and update frequency in a large workspace, we propose a mechanism that can automatically activate a sub-array of sensors with the optimal layout during the capsule movement. The improved multiple objects tracking (IMOT) method is simplified and adapted to our system to estimate the 6-D pose of the capsule in real time. Also, we study the locomotion of a magnetically actuated capsule in a tubular environment, and formulate a method to adaptively adjust the pose of the actuator to improve the propulsion efficiency. Our presented methods are applicable to other permanent magnet-based SMAL systems, and help to improve the actuation efficiency of active WCE. We verify the effectiveness of our proposed system in extensive experiments on phantoms and ex-vivo animal organs. The results demonstrate that our system can achieve convincing performance compared with the state-of-the-art ones in terms of actuation efficiency, workspace size, robustness, localization accuracy and update frequency.