 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Reciprocally Rotating Magnetic Actuation of a Robotic Capsule in Unknown Tubular Environments
Paper and Code
Aug 25, 2021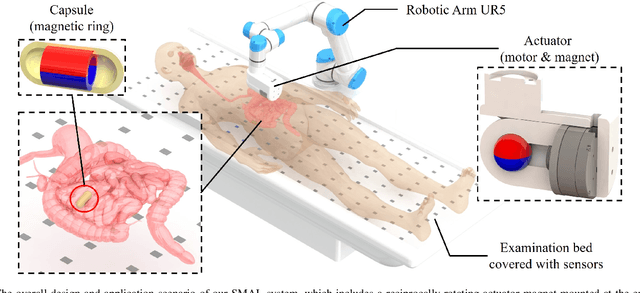
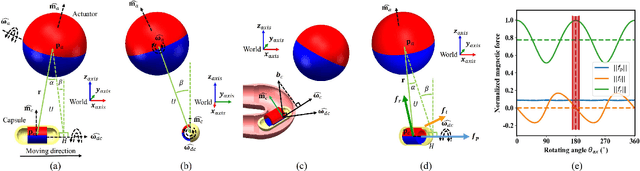
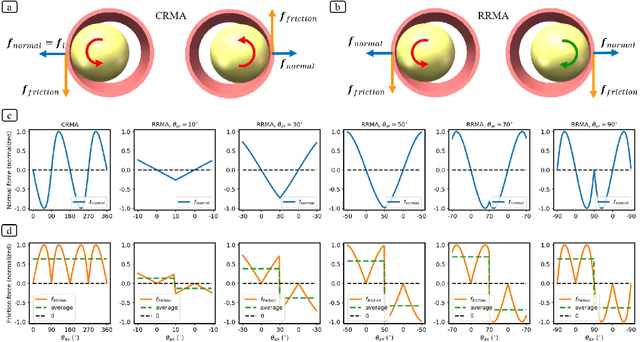
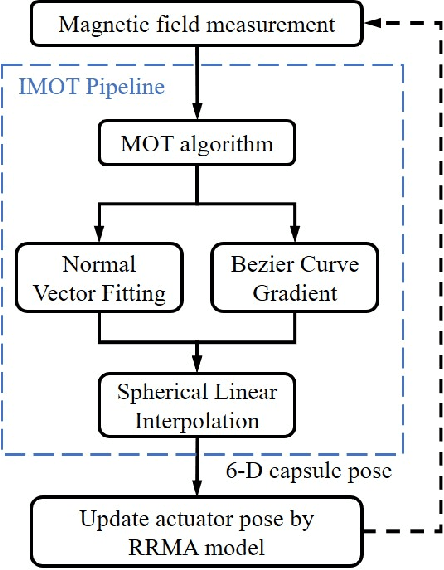
Active wireless capsule endoscopy (WCE) based on simultaneous magnetic actuation and localization (SMAL) techniques holds great promise for improving diagnostic accuracy, reducing examination time and relieving operator burden. To date, the rotating magnetic actuation methods have been constrained to use a continuously rotating permanent magnet. In this paper, we first propose the reciprocally rotating magnetic actuation (RRMA) approach for active WCE to enhance patient safety. We first show how to generate a desired reciprocally rotating magnetic field for capsule actuation, and provide a theoretical analysis of the potential risk of causing volvulus due to the capsule motion. Then, an RRMA-based SMAL workflow is presented to automatically propel a capsule in an unknown tubular environment. We validate the effectiveness of our method in real-world experiments to automatically propel a robotic capsule in an ex-vivo pig colon. The experiment results show that our approach can achieve efficient and robust propulsion of the capsule with an average moving speed of $2.48 mm/s$ in the pig colon, and demonstrate the potential of using RRMA to enhance patient safety, reduce the inspection time, and improve the clinical acceptance of this technology.