 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIDE: Center-based Stereo 3D Detector with Structure-aware Instance Depth Estimation
Paper and Code
Aug 24, 2021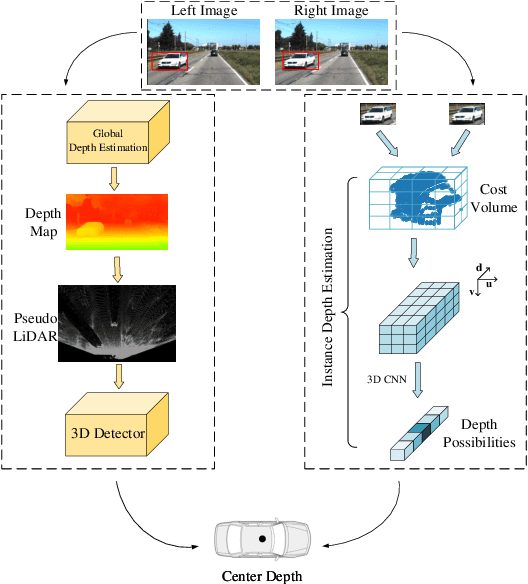
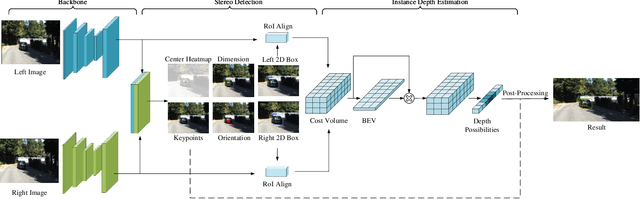
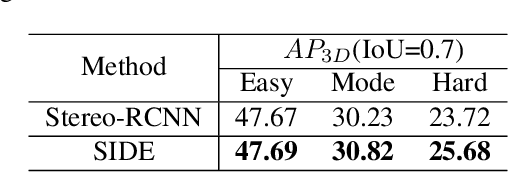
3D detection plays an indispensable role in environment perception. Due to the high cost of commonly used LiDAR sensor, stereo vision based 3D detection, as an economical yet effective setting, attracts more attention recently. For these approaches based on 2D images, accurate depth information is the key to achieve 3D detection, and most existing methods resort to a preliminary stage for depth estimation. They mainly focus on the global depth and neglect the property of depth information in this specific task, namely, sparsity and locality, where exactly accurate depth is only needed for these 3D bounding boxes. Motivated by this finding, we propose a stereo-image based anchor-free 3D detection method, called structure-aware stereo 3D detector (termed as SIDE), where we explore the instance-level depth information via constructing the cost volume from RoIs of each object. Due to the information sparsity of local cost volume, we further introduce match reweighting and structure-aware attention, to make the depth information more concentrated. Experiments conducted on the KITTI dataset show that our method achieves the state-of-the-art performance compared to existing methods without depth map supervision.