 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Neural Mapping: Learning An Implicit Scene Representation from Sequential Observations
Paper and Code

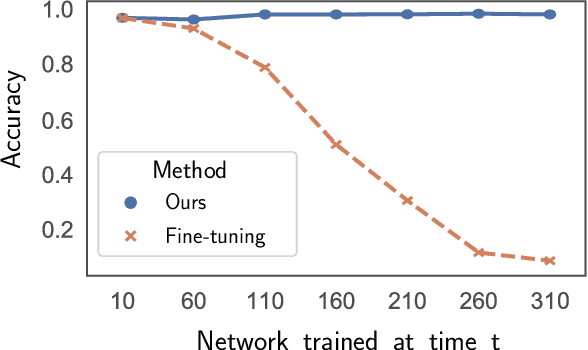
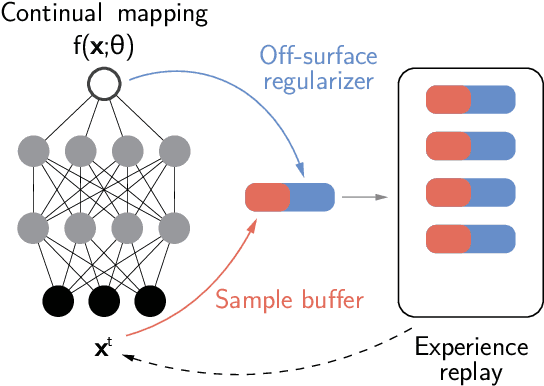
Recent advances have enabled a single neural network to serve as an implicit scene representation, establishing the mapping function between spatial coordinates and scene properties. In this paper, we make a further step towards continual learning of the implicit scene representation directly from sequential observations, namely Continual Neural Mapping. The proposed problem setting bridges the gap between batch-trained implicit neural representations and commonly used streaming data in robotics and vision communities. We introduce an experience replay approach to tackle an exemplary task of continual neural mapping: approximating a continuous signed distance function (SDF) from sequential depth images as a scene geometry representation. We show for the first time that a single network can represent scene geometry over time continually without catastrophic forgetting, while achieving promising trade-offs between accuracy and efficiency.