 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks
Paper and Code
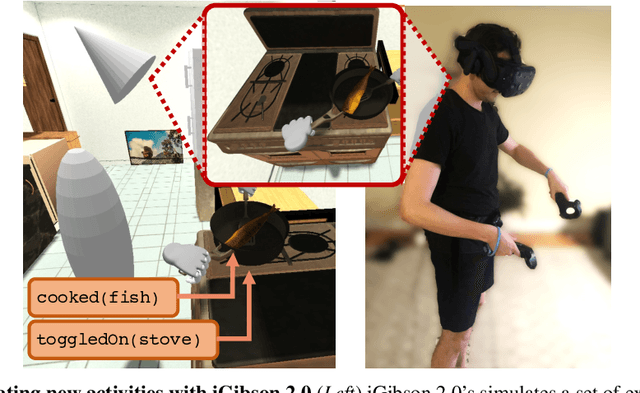
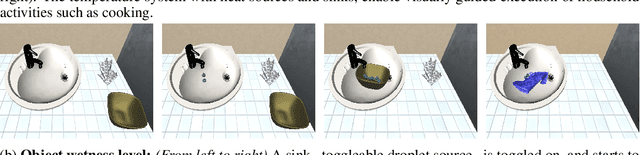
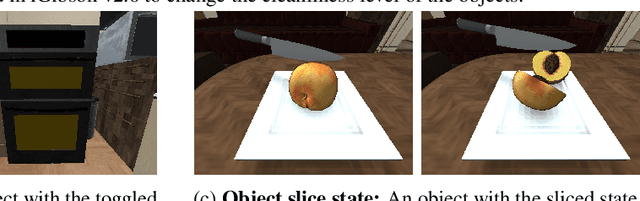
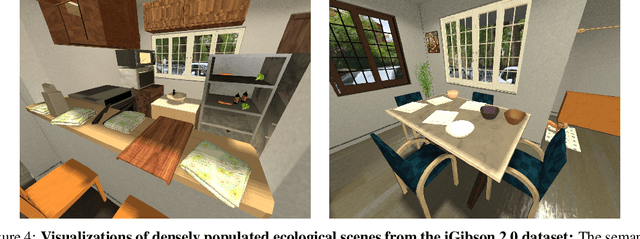
Recent research in embodied AI has been boosted by the use of simulation environments to develop and train robot learning approaches. However, the use of simulation has skewed the attention to tasks that only require what robotics simulators can simulate: motion and physical contact. We present iGibson 2.0, an open-source simulation environment that supports the simulation of a more diverse set of household tasks through three key innovations. First, iGibson 2.0 supports object states, including temperature, wetness level, cleanliness level, and toggled and sliced states, necessary to cover a wider range of tasks. Second, iGibson 2.0 implements a set of predicate logic functions that map the simulator states to logic states like Cooked or Soaked. Additionally, given a logic state, iGibson 2.0 can sample valid physical states that satisfy it. This functionality can generate potentially infinite instances of tasks with minimal effort from the users. The sampling mechanism allows our scenes to be more densely populated with small objects in semantically meaningful locations. Third, iGibson 2.0 includes a virtual reality (VR) interface to immerse humans in its scenes to collect demonstrations. As a result, we can collect demonstrations from humans on these new types of tasks, and use them for imitation learning. We evaluate the new capabilities of iGibson 2.0 to enable robot learning of novel tasks, in the hope of demonstrating the potential of this new simulator to support new research in embodied AI. iGibson 2.0 and its new dataset will be publicly available at http://svl.stanford.edu/igibson/.