 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMFuseNet: Robust Depth Estimation with Learned Multiscopic Fusion
Paper and Code
Aug 06, 2021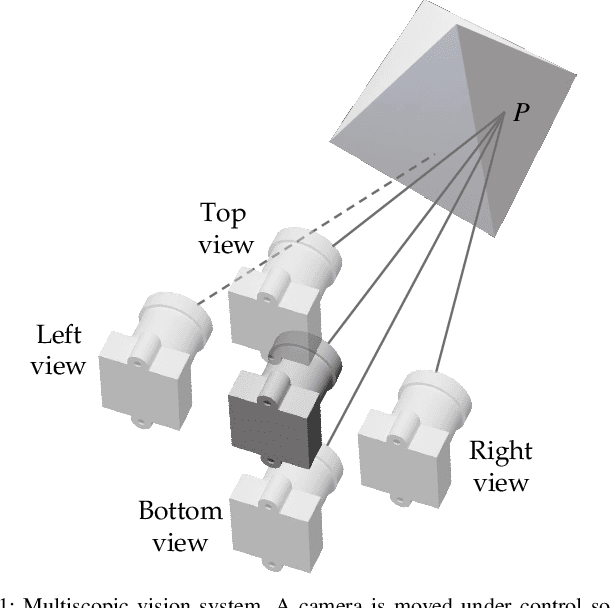
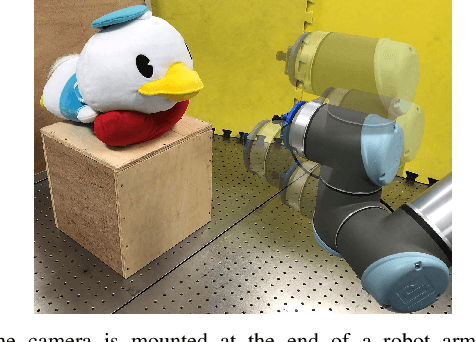
We design a multiscopic vision system that utilizes a low-cost monocular RGB camera to acquire accurate depth estimation. Unlike multi-view stereo with images captured at unconstrained camera poses, the proposed system controls the motion of a camera to capture a sequence of images in horizontally or vertically aligned positions with the same parallax. In this system, we propose a new heuristic method and a robust learning-based method to fuse multiple cost volumes between the reference image and its surrounding images. To obtain training data, we build a synthetic dataset with multiscopic images. The experiments on the real-world Middlebury dataset and real robot demonstration show that our multiscopic vision system outperforms traditional two-frame stereo matching methods in depth estimation. Our code and dataset are available at https://sites.google.com/view/multiscopic.