 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomy 2.0: Why is self-driving always 5 years away?
Paper and Code
Aug 09, 2021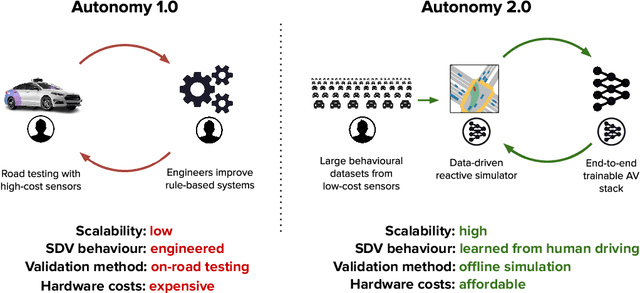
Despite the numerous successes of machine learning over the past decade (image recognition, decision-making, NLP, image synthesis), self-driving technology has not yet followed the same trend. In this paper, we study the history, composition, and development bottlenecks of the modern self-driving stack. We argue that the slow progress is caused by approaches that require too much hand-engineering, an over-reliance on road testing, and high fleet deployment costs. We observe that the classical stack has several bottlenecks that preclude the necessary scale needed to capture the long tail of rare events. To resolve these problems, we outline the principles of Autonomy 2.0, an ML-first approach to self-driving, as a viable alternative to the currently adopted state-of-the-art. This approach is based on (i) a fully differentiable AV stack trainable from human demonstrations, (ii) closed-loop data-driven reactive simulation, and (iii) large-scale, low-cost data collections as critical solutions towards scalability issues. We outline the general architecture, survey promising works in this direction and propose key challenges to be addressed by the community in the future.