Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-view Fusion for Multi-level Robotic Scene Understanding
Paper and Code
Mar 25, 2021
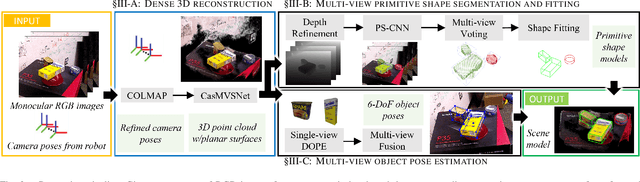
We present a system for multi-level scene awareness for robotic manipulation. Given a sequence of camera-in-hand RGB images, the system calculates three types of information: 1) a point cloud representation of all the surfaces in the scene, for the purpose of obstacle avoidance. 2) the rough pose of unknown objects from categories corresponding to primitive shapes (e.g., cuboids and cylinders), and 3) full 6-DoF pose of known objects. By developing and fusing recent techniques in these domains, we provide a rich scene representation for robot awareness. We demonstrate the importance of each of these modules, their complementary nature, and the potential benefits of the system in the context of robotic manipulation.
* Submitted to ICRA 2021. Video is at https://youtu.be/FuqMxuODGlw
View paper on