 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Motion Control of Wafer Stages via Adaptive Neural Network and Fractional-Order Super-Twisting Algorithm
Paper and Code
Jan 31, 2021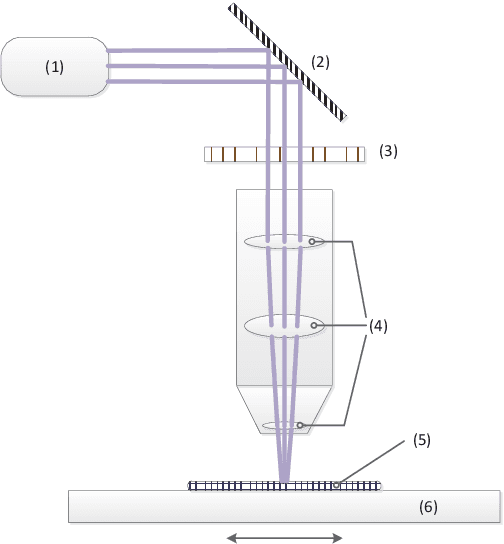
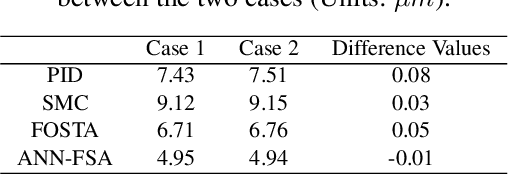
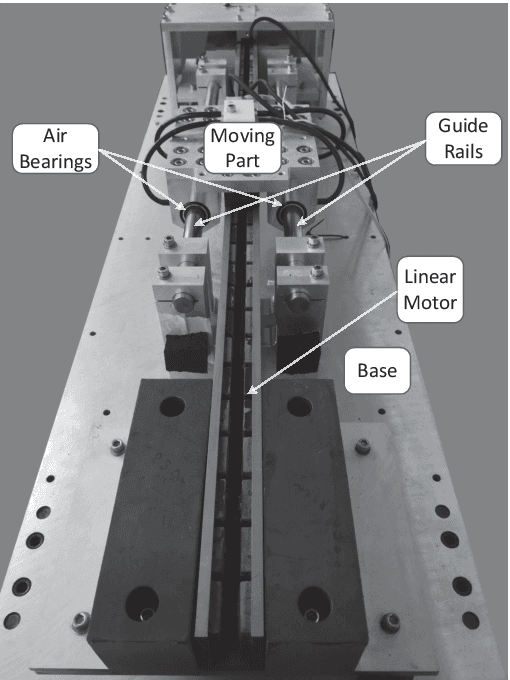
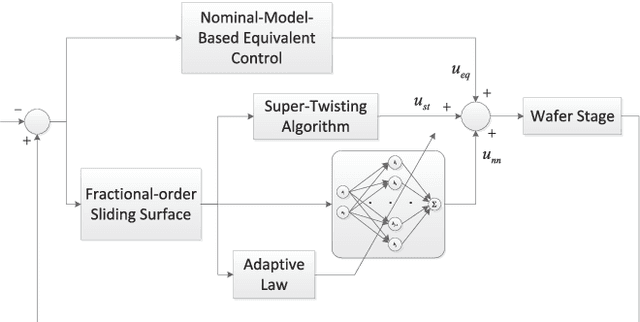
To obtain precise motion control of wafer stages, an adaptive neural network and fractional-order super-twisting control strategy is proposed. Based on sliding mode control (SMC), the proposed controller aims to address two challenges in SMC: 1) reducing the chattering phenomenon, and 2) attenuating the influence of model uncertainties and disturbances. For the first challenge, a fractional-order terminal sliding mode surface and a super-twisting algorithm are integrated into the SMC design. To attenuate uncertainties and disturbances, an add-on control structure based on the radial basis function (RBF) neural network is introduced. Stability analysis of the closed-loop control system is provided. Finally, experiments on a wafer stage testbed system are conducted, which proves that the proposed controller can robustly improve the tracking performance in the presence of uncertainties and disturbances compared to conventional and previous controllers.