 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-'N-Flying: A Learning-based, Decentralized Mission Aware UAS Collision Avoidance Scheme
Paper and Code
Jan 25, 2021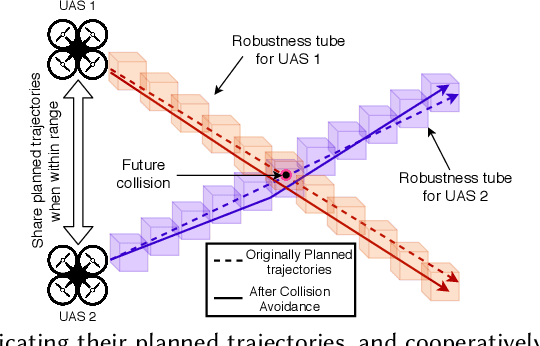
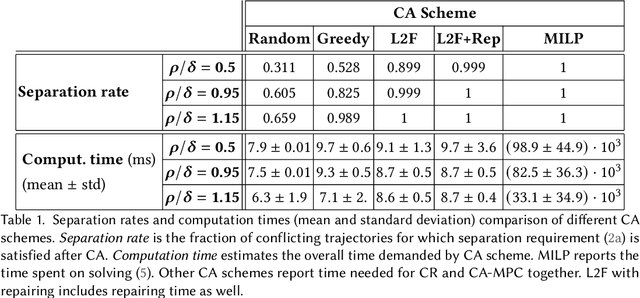
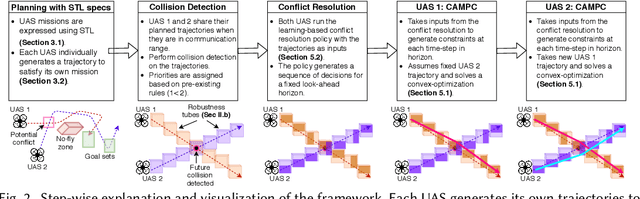
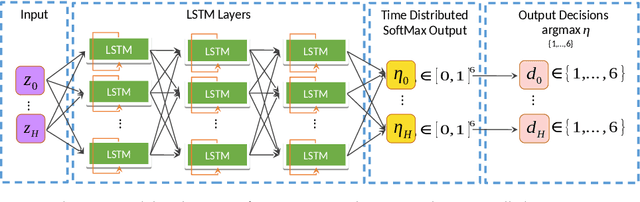
Urban Air Mobility, the scenario where hundreds of manned and Unmanned Aircraft System (UAS) carry out a wide variety of missions (e.g. moving humans and goods within the city), is gaining acceptance as a transportation solution of the future. One of the key requirements for this to happen is safely managing the air traffic in these urban airspaces. Due to the expected density of the airspace, this requires fast autonomous solutions that can be deployed online. We propose Learning-'N-Flying (LNF) a multi-UAS Collision Avoidance (CA) framework. It is decentralized, works on-the-fly and allows autonomous UAS managed by different operators to safely carry out complex missions, represented using Signal Temporal Logic, in a shared airspace. We initially formulate the problem of predictive collision avoidance for two UAS as a mixed-integer linear program, and show that it is intractable to solve online. Instead, we first develop Learning-to-Fly (L2F) by combining: a) learning-based decision-making, and b) decentralized convex optimization-based control. LNF extends L2F to cases where there are more than two UAS on a collision path. Through extensive simulations, we show that our method can run online (computation time in the order of milliseconds), and under certain assumptions has failure rates of less than 1% in the worst-case, improving to near 0% in more relaxed operations. We show the applicability of our scheme to a wide variety of settings through multiple case studies.