 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Model Learning using Informative Trajectories for Improved Closed-Loop Control on Real Robots
Paper and Code
Jan 20, 2021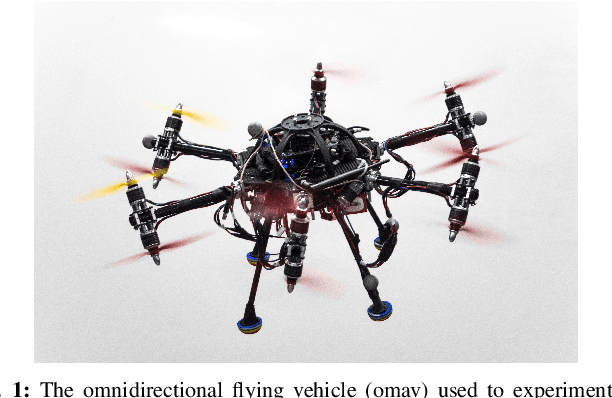
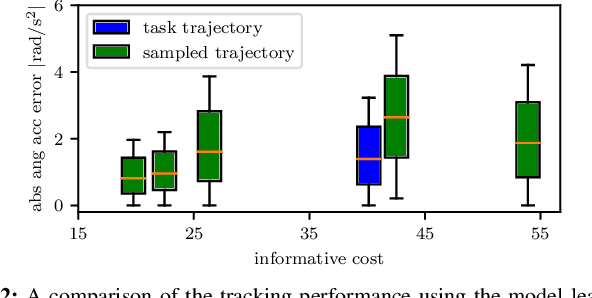
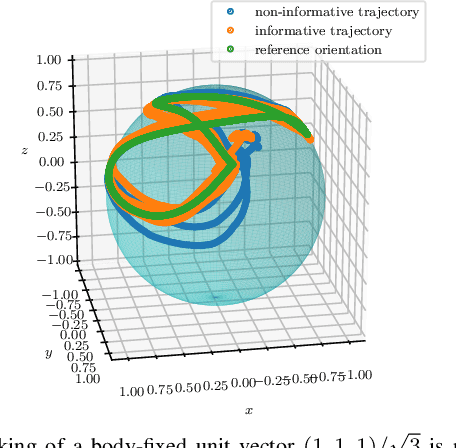
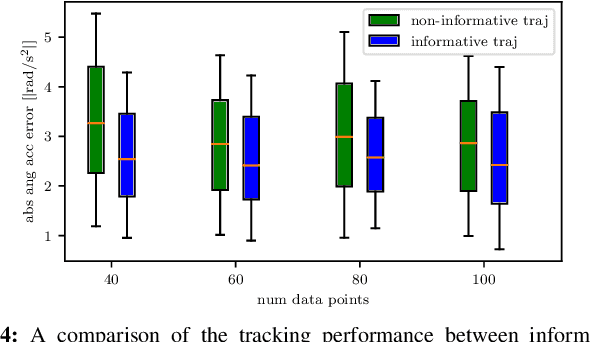
Model-based controllers on real robots require accurate knowledge of the system dynamics to perform optimally. For complex dynamics, first-principles modeling is not sufficiently precise, and data-driven approaches can be leveraged to learn a statistical model from real experiments. However, the efficient and effective data collection for such a data-driven system on real robots is still an open challenge. This paper introduces an optimization problem formulation to find an informative trajectory that allows for efficient data collection and model learning. We present a sampling-based method that computes an approximation of the trajectory that minimizes the prediction uncertainty of the dynamics model. This trajectory is then executed, collecting the data to update the learned model. In experiments we demonstrate the capabilities of our proposed framework when applied to a complex omnidirectional flying vehicle with tiltable rotors. Using our informative trajectories results in models which outperform models obtained from non-informative trajectory by 13.3\% with the same amount of training data. Furthermore, we show that the model learned from informative trajectories generalizes better than the one learned from non-informative trajectories, achieving better tracking performance on different tasks.