 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Safe Multi-Agent Control with Decentralized Neural Barrier Certificates
Paper and Code
Jan 31, 2021

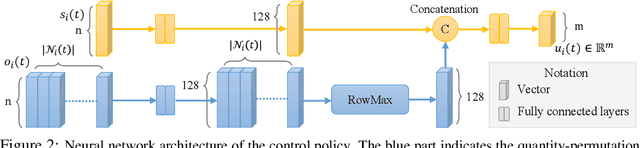
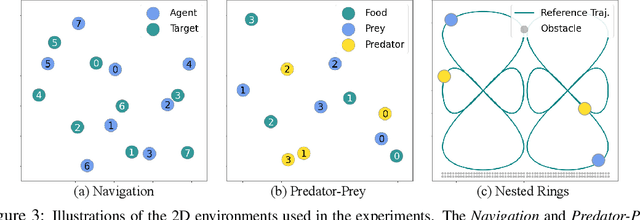
We study the multi-agent safe control problem where agents should avoid collisions to static obstacles and collisions with each other while reaching their goals. Our core idea is to learn the multi-agent control policy jointly with learning the control barrier functions as safety certificates. We propose a novel joint-learning framework that can be implemented in a decentralized fashion, with generalization guarantees for certain function classes. Such a decentralized framework can adapt to an arbitrarily large number of agents. Building upon this framework, we further improve the scalability by incorporating neural network architectures that are invariant to the quantity and permutation of neighboring agents. In addition, we propose a new spontaneous policy refinement method to further enforce the certificate condition during testing. We provide extensive experiments to demonstrate that our method significantly outperforms other leading multi-agent control approaches in terms of maintaining safety and completing original tasks. Our approach also shows exceptional generalization capability in that the control policy can be trained with 8 agents in one scenario, while being used on other scenarios with up to 1024 agents in complex multi-agent environments and dynamics.