Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmartArm: Suturing Feasibility of a Surgical Robotic System on a Neonatal Chest Model
Paper and Code
Jan 04, 2021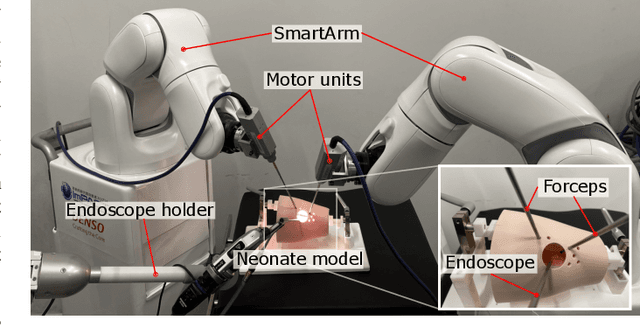
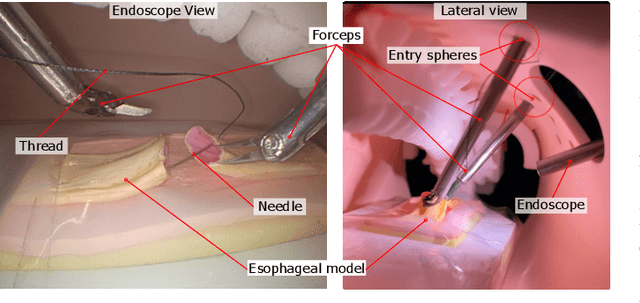
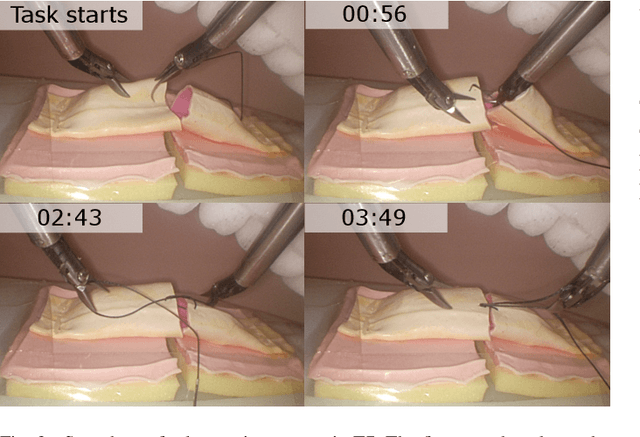
Commercially available surgical-robot technology currently addresses many surgical scenarios for adult patients. This same technology cannot be used to the benefit of neonate patients given the considerably smaller workspace. Medically relevant procedures regarding neonate patients include minimally invasive surgery to repair congenital esophagus disorders, which entail the suturing of the fragile esophagus within the narrow neonate cavity. In this work, we explore the use of the SmartArm robotic system in a feasibility study using a neonate chest and esophagus model. We show that a medically inexperienced operator can perform two-throw knots inside the neonate chest model using the robotic system.
* IEEE Transactions on Medical Robotics and Bionics (2021) * Accepted on T-MRB 2021, 4 pages
View paper on