 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Adaptive Velocity Optimization for Autonomous Electric Cars at the Limits of Handling
Paper and Code
Dec 25, 2020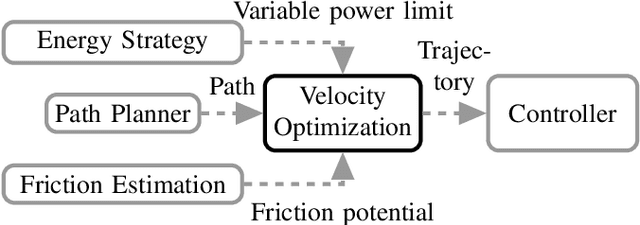
With the evolution of self-driving cars, autonomous racing series like Roborace and the Indy Autonomous Challenge are rapidly attracting growing attention. Researchers participating in these competitions hope to subsequently transfer their developed functionality to passenger vehicles, in order to improve self-driving technology for reasons of safety, and due to environmental and social benefits. The race track has the advantage of being a safe environment where challenging situations for the algorithms are permanently created. To achieve minimum lap times on the race track, it is important to gather and process information about external influences including, e.g., the position of other cars and the friction potential between the road and the tires. Furthermore, the predicted behavior of the ego-car's propulsion system is crucial for leveraging the available energy as efficiently as possible. In this paper, we therefore present an optimization-based velocity planner, mathematically formulated as a multi-parametric Sequential Quadratic Problem (mpSQP). This planner can handle a spatially and temporally varying friction coefficient, and transfer a race Energy Strategy (ES) to the road. It further handles the velocity-profile-generation task for performance and emergency trajectories in real time on the vehicle's Electronic Control Unit (ECU).