 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDAGMapper: Learning to Map by Discovering Lane Topology
Paper and Code
Dec 22, 2020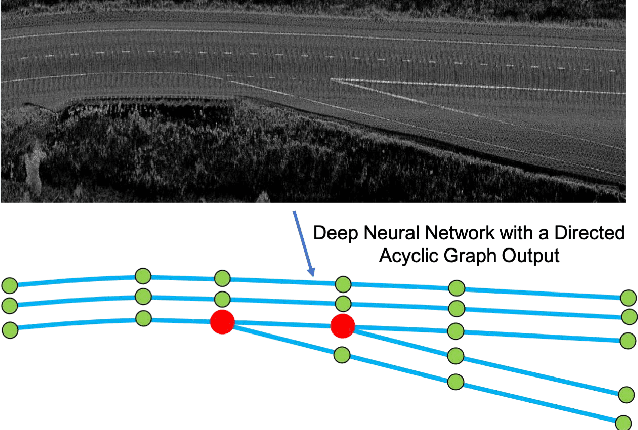

One of the fundamental challenges to scale self-driving is being able to create accurate high definition maps (HD maps) with low cost. Current attempts to automate this process typically focus on simple scenarios, estimate independent maps per frame or do not have the level of precision required by modern self driving vehicles. In contrast, in this paper we focus on drawing the lane boundaries of complex highways with many lanes that contain topology changes due to forks and merges. Towards this goal, we formulate the problem as inference in a directed acyclic graphical model (DAG), where the nodes of the graph encode geometric and topological properties of the local regions of the lane boundaries. Since we do not know a priori the topology of the lanes, we also infer the DAG topology (i.e., nodes and edges) for each region. We demonstrate the effectiveness of our approach on two major North American Highways in two different states and show high precision and recall as well as 89% correct topology.