 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Road Surface 3D Reconstruction and Pothole Detection: From Perspective Transformation to Disparity Map Segmentation
Paper and Code
Dec 31, 2020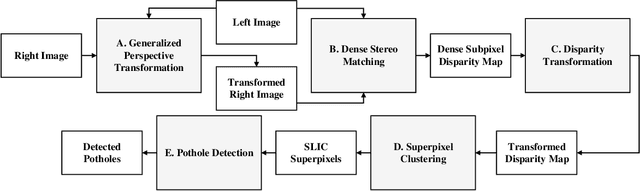
Potholes are one of the most common forms of road damage, which can severely affect driving comfort, road safety and vehicle condition. Pothole detection is typically performed by either structural engineers or certified inspectors. This task is, however, not only hazardous for the personnel but also extremely time-consuming. This paper presents an efficient pothole detection algorithm based on road disparity map estimation and segmentation. We first generalize the perspective transformation by incorporating the stereo rig roll angle. The road disparities are then estimated using semi-global matching. A disparity map transformation algorithm is then performed to better distinguish the damaged road areas. Finally, we utilize simple linear iterative clustering to group the transformed disparities into a collection of superpixels. The potholes are then detected by finding the superpixels, whose values are lower than an adaptively determined threshold. The proposed algorithm is implemented on an NVIDIA RTX 2080 Ti GPU in CUDA. The experiments demonstrate the accuracy and efficiency of our proposed road pothole detection algorithm, where an accuracy of 99.6% and an F-score of 89.4% are achieved.