 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowd-Driven Mapping, Localization and Planning
Paper and Code
Jan 03, 2021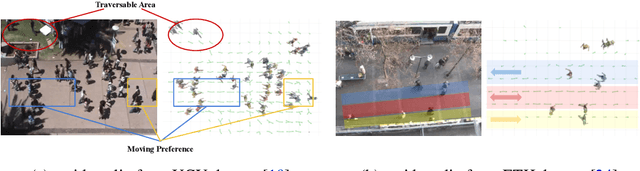
Navigation in dense crowds is a well-known open problem in robotics with many challenges in mapping, localization, and planning. Traditional solutions consider dense pedestrians as passive/active moving obstacles that are the cause of all troubles: they negatively affect the sensing of static scene landmarks and must be actively avoided for safety. In this paper, we provide a new perspective: the crowd flow locally observed can be treated as a sensory measurement about the surrounding scenario, encoding not only the scene's traversability but also its social navigation preference. We demonstrate that even using the crowd-flow measurement alone without any sensing about static obstacles, our method still accomplishes good results for mapping, localization, and social-aware planning in dense crowds. Videos of the experiments are available at https://sites.google.com/view/crowdmapping.