Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructured Policy Representation: Imposing Stability in arbitrarily conditioned dynamic systems
Paper and Code
Dec 11, 2020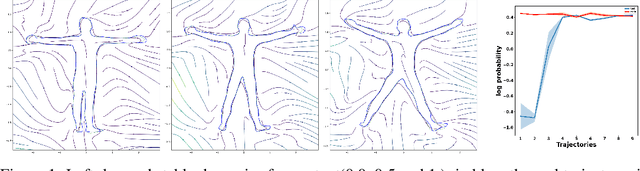
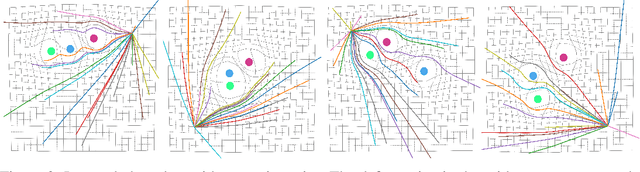
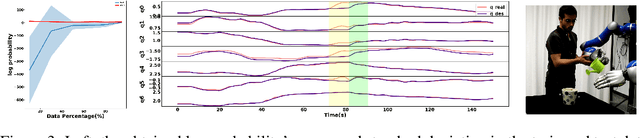
We present a new family of deep neural network-based dynamic systems. The presented dynamics are globally stable and can be conditioned with an arbitrary context state. We show how these dynamics can be used as structured robot policies. Global stability is one of the most important and straightforward inductive biases as it allows us to impose reasonable behaviors outside the region of the demonstrations.
* Presented in NeurIPS 2020, 3rd Robot Learning Workshop. Stability,
Few-Shot Learning, Deep Dynamic Systems
View paper on