 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer Stereo Vision for Autonomous Driving
Paper and Code
Dec 17, 2020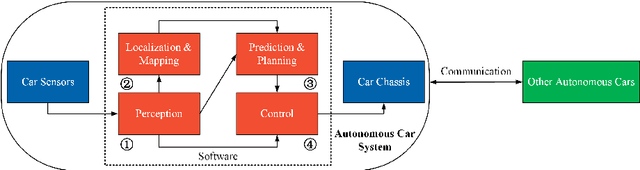
As an important component of autonomous systems, autonomous car perception has had a big leap with recent advances in parallel computing architectures. With the use of tiny but full-feature embedded supercomputers, computer stereo vision has been prevalently applied in autonomous cars for depth perception. The two key aspects of computer stereo vision are speed and accuracy. They are both desirable but conflicting properties, as the algorithms with better disparity accuracy usually have higher computational complexity. Therefore, the main aim of developing a computer stereo vision algorithm for resource-limited hardware is to improve the trade-off between speed and accuracy. In this chapter, we introduce both the hardware and software aspects of computer stereo vision for autonomous car systems. Then, we discuss four autonomous car perception tasks, including 1) visual feature detection, description and matching, 2) 3D information acquisition, 3) object detection/recognition and 4) semantic image segmentation. The principles of computer stereo vision and parallel computing on multi-threading CPU and GPU architectures are then detailed.